



Cet article a été rédigé par Liam Drew et publié à l'origine dans Nature
La joue gauche de Markus Möllmann-Bohle cache un secret qui a changé sa vie. Sous la peau, niché parmi les fibres nerveuses qui lui permettent de sentir et de bouger son visage, se trouve un récepteur radio miniature et six minuscules électrodes. "Je suis un cyborg", dit-il en riant.
Ce dispositif électronique reste inactif la plupart du temps. Mais lorsque Möllmann-Bohle sent que la pression commence à s'accumuler autour de son œil gauche, il sort une baguette en plastique noir de la taille d'un téléphone portable, appuie sur un bouton et la fixe contre son visage à l'aide d'une écharpe fabriquée à la maison. La télécommande vibre un instant, puis envoie des ondes radio à haute fréquence dans sa joue.
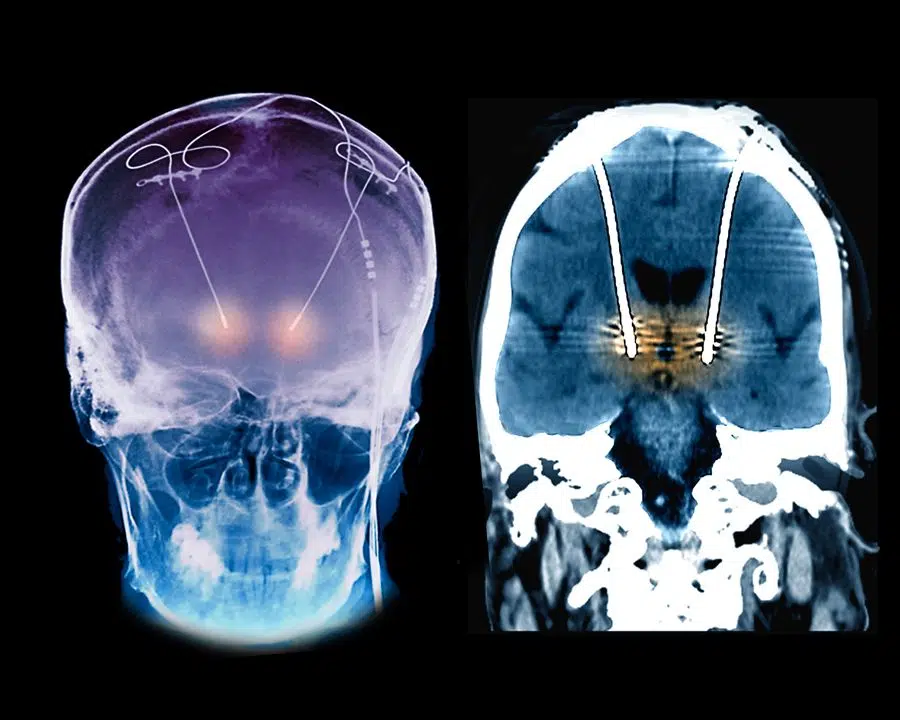
En réponse, l'implant envoie une séquence d'impulsions électriques dans un faisceau de cellules nerveuses appelé ganglion sphénopalatin. En perturbant ces neurones, le dispositif évite à Möllmann-Bohle, 57 ans, le pire des maux de tête en grappe qui le tourmentent depuis des décennies. Il utilise l'implant plusieurs fois par jour. "J'ai besoin de ce dispositif pour vivre une bonne vie", dit-il.
Les céphalées en grappe sont rares, mais extraordinairement douloureuses. Les personnes touchées le sont généralement à vie et les possibilités de traitement sont très limitées. Möllmann-Bohle a connu sa première migraine en 1987, à l'âge de 22 ans. Pendant des décennies, il a géré ses maux de tête sporadiques à l'aide d'un mélange d'analgésiques et de médicaments contre la migraine. Mais en 2006, son état est devenu chronique et il a été frappé par des céphalées en grappe pouvant durer jusqu'à huit heures par jour. "J'ai été contraint de succomber à la douleur, encore et encore", dit-il. "On m'a empêché de vivre ma vie.
"J'ai été forcée de succomber à la douleur, encore et encore. On m'a empêché de vivre ma vie.
Möllmann-Bohle, de plus en plus dépendant des analgésiques et prenant maintenant aussi des antidépresseurs, a été hospitalisé à plusieurs reprises. Au cours de l'un de ces séjours, il a entendu parler d'un implant électronique que certaines personnes avaient commencé à utiliser pour contrôler leurs céphalées en grappe.
Développé par la start-up Autonomic Technologies (connue sous le nom d'ATI) à San Francisco, en Californie, le dispositif avait passé avec brio une série d'essais cliniques contrôlés par placebo. "Il a remarquablement bien fonctionné", déclare Arne May, neurologue à l'université de Hambourg (Allemagne), qui a dirigé certains de ces essais pour le compte de la start-up. Chez la plupart des personnes, la stimulation a réduit la douleur des crises, les a rendues moins fréquentes, ou les deux à la fois.1. Les effets secondaires étaient rares. En février 2012, alors que les essais se poursuivaient aux États-Unis, l'Agence européenne des médicaments a autorisé la société à commercialiser le dispositif en Europe.
Möllmann-Bohle a contacté May et s'est déplacé de son domicile près de Düsseldorf, en Allemagne, pour le rencontrer. Rempli de l'espoir que cela pourrait soulager ses souffrances, Möllmann-Bohle s'est fait opérer pour se faire poser le dispositif en 2013.
L'implant a été une révélation. Après avoir adapté le schéma et l'intensité de la stimulation aux besoins de Möllmann-Bohle, une heure d'utilisation environ, cinq ou six fois par jour, a suffi pour empêcher les crises de devenir débilitantes. "Je renaissais", dit-il.
Mais à la fin de l'année 2019, ATI s'est effondrée. La fermeture de l'entreprise a laissé Möllmann-Bohle et plus de 700 autres personnes seules avec un dispositif médical implanté complexe. Les personnes utilisant le stimulateur et leurs médecins ne pouvaient plus accéder au logiciel propriétaire nécessaire pour recalibrer l'appareil et maintenir son efficacité. Möllmann-Bohle et ses compagnons d'infortune étaient désormais confrontés à la perspective d'une usure de la pile de la télécommande, ce qui les priverait du soulagement qu'ils avaient trouvé. "Je me suis retrouvé sous la pluie", raconte Möllmann-Bohle.

Un problème systémique
Des centaines de milliers de personnes bénéficient chaque jour d'une neurotechnologie implantée. Parmi les dispositifs les plus courants figurent les stimulateurs de la moelle épinière, commercialisés pour la première fois en 1968, qui aident à soulager les douleurs chroniques. Les implants cochléaires, qui procurent un sens de l'audition, et les systèmes de stimulation cérébrale profonde (SCP), qui atténuent les tremblements débilitants de la maladie de Parkinson, sont également des thérapies établies.
Encouragés par ces succès et portés par les progrès de l'informatique et de l'ingénierie, les chercheurs tentent de mettre au point des dispositifs toujours plus sophistiqués pour de nombreuses autres affections neurologiques et psychiatriques. Plutôt que de simplement stimuler le cerveau, la moelle épinière ou les nerfs périphériques, certains dispositifs surveillent désormais l'activité neuronale et y réagissent.
Par exemple, en 2013, la Food and Drug Administration des États-Unis a approuvé un système en boucle fermée pour les personnes atteintes d'épilepsie. Ce dispositif détecte les signes d'activité neuronale qui pourraient indiquer une crise et stimule le cerveau pour la supprimer. Certains chercheurs cherchent à traiter la dépression en créant des dispositifs analogues capables de suivre les signaux liés à l'humeur. Enfin, des systèmes permettant aux personnes tétraplégiques de contrôler des ordinateurs et des prothèses par la seule force de leur pensée sont également en cours de développement et bénéficient d'un financement important.
Le marché des neurotechnologies devrait croître d'environ 75 % d'ici à 2026, pour atteindre 17,1 milliards de dollars américains. Cependant, à mesure que les investissements commerciaux augmentent, il arrive aussi que des entreprises de neurotechnologie abandonnent leurs produits ou fassent faillite, abandonnant ainsi les personnes qui dépendent de leur appareil.

Peu après la disparition d'ATI, une société appelée Nuvectra, basée à Plano, au Texas, a déposé son bilan en 2019. Son dispositif - un nouveau type de stimulateur de la moelle épinière pour les douleurs chroniques - avait été implanté chez au moins 3 000 personnes. En 2020, l'entreprise de vision artificielle Second Sight, située à Sylmar, en Californie, a licencié la plupart de ses employés, mettant fin à l'aide apportée aux quelque 350 personnes qui utilisaient son implant rétinien tant annoncé pour voir. En juin, un autre fabricant de stimulateurs de la moelle épinière, Stimwave, à Pompano Beach (Floride), a déposé son bilan. L'entreprise a été rachetée par une société de gestion de crédit et se trouve actuellement engagée dans une bataille juridique avec son ancien directeur général. Des milliers de personnes équipées du stimulateur et leurs médecins observent la situation dans l'espoir que l'entreprise poursuive ses activités.
Lorsque les fabricants de dispositifs implantés font faillite, les implants eux-mêmes sont généralement laissés en place - l'intervention chirurgicale pour les retirer est souvent trop coûteuse ou risquée, ou simplement jugée inutile. Mais sans l'assistance technique permanente du fabricant, ce n'est qu'une question de temps avant que la programmation ne doive être ajustée, qu'un fil accroché ou qu'une batterie épuisée ne rende l'implant inutilisable.
Les personnes concernées doivent alors chercher un autre moyen de gérer leur maladie, mais avec la difficulté supplémentaire d'un implant non fonctionnel qui peut constituer un obstacle à l'imagerie médicale et aux implants futurs. Pour certaines personnes, dont Möllmann-Bohle, il n'existe pas d'alternative claire.
"Il s'agit d'un problème systémique", déclare Jennifer French, directrice exécutive de Neurotech Network, une organisation de défense et de soutien des patients située à St Petersburg, en Floride. "Il remonte jusqu'aux essais cliniques, et je ne pense pas qu'il ait reçu suffisamment d'attention".
Alors que l'argent afflue dans le secteur des neurotechnologies, les porteurs d'implants, les médecins, les ingénieurs biomédicaux et les éthiciens médicaux demandent tous que des mesures soient prises pour protéger les personnes porteuses d'implants neuronaux. "Malheureusement, ce type d'investissement s'accompagne d'échecs", déclare Gabriel Lázaro-Muñoz, éthicien spécialisé dans les neurotechnologies à la Harvard Medical School de Boston (Massachusetts). "Nous devons trouver un moyen de minimiser les préjudices que les patients subiront à cause de ces échecs.

Livrés à eux-mêmes
Lorsque Möllmann-Bohle s'est fait implanter le neurostimulateur fabriqué par l'ATI pour soulager ses maux de tête, il a accepté de participer à un essai post-approbation de cinq ans visant à perfectionner le dispositif. Il a fourni avec diligence à l'ATI les données de son appareil et a répondu à des questionnaires sur ses progrès. Tous les deux mois, il a fait un voyage aller-retour de 800 kilomètres à Hambourg pour être évalué.
Mais quatre ans plus tard, la société chargée de l'essai pour le compte d'ATI a appelé Möllmann-Bohle pour lui annoncer que l'essai était terminé. Des rumeurs se sont répandues selon lesquelles l'entreprise était en difficulté, avant qu'une lettre du mois de mai ne vienne confirmer ses craintes : l'ATI avait fait faillite.
Timothy White, un autre patient ayant reçu le stimulateur de l'entreprise et ayant participé à l'essai post-approbation, a également entendu parler de la fermeture d'ATI de seconde main.
Aujourd'hui responsable des affaires cliniques pour une société de dispositifs médicaux basée près de Francfort, M. White attribue à l'appareil le mérite de lui avoir permis d'achever sa formation médicale. En effet, ATI s'était emparé de l'enthousiasme de cet éloquent étudiant en médecine pour sa technologie et lui avait demandé de prendre la parole lors de conférences et devant des investisseurs.
Pourtant, même White n'a entendu parler de l'effondrement de l'entreprise que lorsqu'il a contacté May pour lui faire part de ses inquiétudes quant aux performances de sa télécommande.
"Cela a été très dur pour moi", confie M. White. "Je me demandais ce qui se passerait si je perdais ma télécommande, si elle tombait en panne ou si la batterie s'épuisait. Mais personne n'avait vraiment de réponses.
Lorsqu'un fabricant d'implants disparaît, le sort des personnes qui utilisent ses dispositifs varie considérablement.
Dans certains cas, des solutions de remplacement seront disponibles. Lorsque Nuvectra a fermé ses portes, par exemple, les utilisateurs de son stimulateur de la moelle épinière qui craignaient une résurgence de leurs douleurs chroniques ont pu se tourner vers des dispositifs similaires proposés par des entreprises mieux établies.
Selon l'anesthésiste Anjum Bux, même dans le meilleur des cas, les personnes qui utilisent les implants, dont beaucoup sont déjà vulnérables, sont soumises à des contraintes considérables. Il estime qu'environ 70 personnes ont reçu le dispositif Nuvectra dans ses cliniques de traitement de la douleur du Kentucky.
Le remplacement d'implants obsolètes de ce type nécessite une intervention chirurgicale qui, autrement, n'aurait pas été nécessaire, et il faut des semaines pour s'en remettre. L'opération et le dispositif de remplacement coûtent environ 40 000 dollars, ce qui est également onéreux, même si M. Bux affirme que, d'après son expérience, les compagnies d'assurance ont pris en charge la facture.
Le défi est d'autant plus grand qu'il n'existe pas de substitut prêt à l'emploi. Le stimulateur fabriqué par ATI dont Möllmann-Bohle et White sont équipés était le premier du genre. Lorsque le fabricant a fermé ses portes, il n'y avait pas d'autre implant sur le marché qu'ils pouvaient utiliser pour gérer leurs céphalées en grappe.
Livrés à eux-mêmes, White et Möllmann-Bohle se sont appuyés sur leur propre expertise professionnelle. M. White s'est appuyé sur sa formation médicale et a trouvé un médicament conçu pour traiter les migraines, qui supprime ses maux de tête. Mais il doit prendre le triple de la dose recommandée et s'inquiète des effets secondaires potentiels à long terme.
Möllmann-Bohle, quant à lui, s'est tourné vers les compétences qu'il a développées en tant qu'ingénieur électricien. Au cours des trois dernières années, il a réparé un port de charge défectueux sur la partie portable de son appareil et a remplacé plusieurs fois la batterie intégrée. Cette batterie n'a jamais été conçue pour être accessible à l'utilisateur, et elle s'est révélée inhabituelle. Möllmann-Bohle a parcouru l'internet et a fini par trouver des batteries de remplacement appropriées, fabriquées par une entreprise américaine. Mais lorsqu'il est revenu en chercher d'autres, il a appris que l'entreprise avait cessé d'en fabriquer. Son remplacement le plus récent est venu d'une entreprise chinoise qui a fabriqué sur mesure ce dont il avait besoin.
Son bricolage l'a mis en conflit avec ses assureurs, qui lui ont d'abord conseillé de ne pas modifier l'appareil, mais qui ont finalement accepté de payer la facture des pièces de rechange, après qu'il les a convaincus qu'il était dûment qualifié. "Ils m'ont mis des bâtons dans les roues, ou du moins ils ont essayé de le faire", explique Möllmann-Bohle. Bien que ses réparations aient été couronnées de succès jusqu'à présent, il sait qu'il ne dispose pas des outils ou des compétences nécessaires pour réparer tout ce qui pourrait tomber en panne.

Bien que l'entretien du dispositif ait été difficile, Möllmann-Bohle ne voit pas d'autre solution. "Il n'existe toujours pas de médicament suffisamment fiable pour m'aider à vivre sans douleur sans le dispositif", déclare-t-il.
M. White et lui-même placent désormais une grande partie de leurs espoirs dans le renouveau potentiel de la technologie du stimulateur d'ATI. Fin 2020, une société appelée Realeve, basée à Effingham, dans l'Illinois, a annoncé qu'elle avait acquis les brevets de l'appareil. La nouvelle société a l'intention de commercialiser un appareil successeur essentiellement identique aux États-Unis et en Europe. En avril 2021, Realeve a obtenu le statut de percée de la FDA, qui vise à accélérer l'accès aux dispositifs médicaux aux États-Unis.
Möllmann-Bohle et White ont tous deux contacté Realeve au début de l'année et ont correspondu directement avec le directeur général de l'époque, Jon Snyder, pour demander de l'aide pour leurs implants. Jusqu'à présent, ils n'ont reçu aucune aide. Dans un courriel adressé à Nature en juillet, M. Snyder a déclaré : "Comme nous n'avons pas encore reçu l'approbation de la FDA ou du marquage CE, nous ne sommes pas en mesure de commercialiser la thérapie et de fournir une assistance. Toutefois, nous avons étudié les possibilités de fournir une assistance par le biais d'autorisations d'utilisation à des fins humanitaires sur différents marchés".
Möllmann-Bohle souhaite désespérément que ce soutien se concrétise. "Il [Snyder] m'a assuré que lui et son équipe s'efforçaient de fournir des pièces de rechange", dit-il. Des changements sont intervenus à Realeve au cours des derniers mois, avec le départ de M. Snyder et la prise de contrôle temporaire de l'entreprise par une société de conseil. Mais Peter Donato, directeur général par intérim, affirme que l'entreprise a obtenu l'autorisation au Danemark de distribuer des appareils et des logiciels de remplacement aux utilisateurs existants. Il espère pouvoir commencer les livraisons dans la seconde moitié de 2023, et précise qu'il est également en pourparlers avec trois autres pays européens. Pour Möllmann-Bohle et d'autres en Allemagne, l'attente se poursuit. "Ce nouveau départ est attendu depuis des années", déclare-t-il.
"Ce nouveau départ se prépare depuis des années. Je suis plein d'espoir, mais je suis aussi réaliste".

Un engagement en faveur des soins
Les exemples de fabricants soutenant la neurotechnologie implantée lorsque les bénéfices ne se matérialisent pas sont rares. French peut donc se considérer comme l'une des plus chanceuses.
En plus d'être une ardente défenseuse des neurotechnologies, elle utilise un dispositif implanté pour l'aider à se déplacer depuis plus de 20 ans, même si cette technologie qui a changé sa vie n'est jamais devenue le fondement d'une entreprise viable.
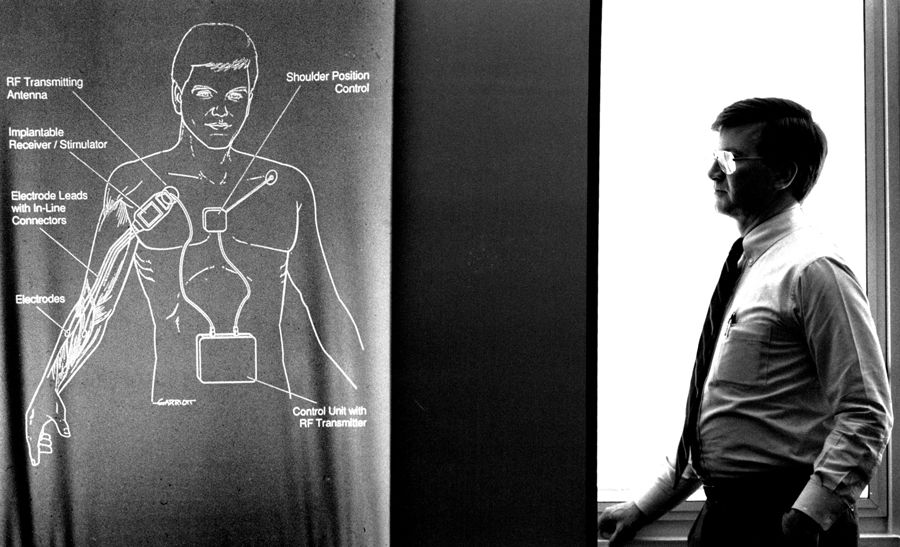
En 1999, deux ans après un accident de snowboard qui l'avait rendue incapable de bouger ses jambes, French s'est inscrite à un essai clinique portant sur un système d'implant électrique conçu par Ronald Triolo, ingénieur biomédical à l'université Case Western Reserve de Cleveland, dans l'Ohio.
Pendant sept heures et demie, les chirurgiens ont placé 16 électrodes dans son corps, chacune pouvant stimuler un nerf qui court vers les muscles de sa jambe. Ces électrodes ont été connectées à un générateur d'impulsions implanté, qui est alimenté sans fil et contrôlé par une unité externe.
Au départ, l'implant permettait à Mme French de se tenir debout et de se déplacer entre son fauteuil roulant et un lit ou une voiture. Au fil du temps, d'autres électrodes et contrôleurs ont été ajoutés. Aujourd'hui, elle peut se tenir debout, marcher et pédaler sur un vélo d'appartement. "Je l'utilise tous les jours pour faire de l'exercice, pour me tenir debout, pour fonctionner", dit-elle.

Bien que l'appareil n'ait pas été commercialisé au moment où French a participé à l'essai, Triolo s'attendait à ce qu'il le soit rapidement - un système similaire développé à Case Western pour restaurer les mouvements fonctionnels de la main et du bras, connu sous le nom de Freehand, a été mis sur le marché par une start-up locale en 1997.
Mais cela ne s'est pas produit. Malgré la différence qu'il a apportée à la vie de Mme French, le dispositif qu'elle utilise n'a jamais été commercialisé. La société qui avait acquis les droits sur le système Freehand a fermé ses portes en 2001, et aucune autre société n'a repris l'appareil. Le concepteur de Freehand, l'ingénieur biomédical Hunter Peckham, également à Case Western, attribue l'échec de la start-up à l'impatience des investisseurs. "L'adoption n'a pas été aussi rapide qu'ils l'auraient souhaité", explique-t-il.
Environ 350 personnes équipées de dispositifs Freehand, ainsi que French et ses collègues participant à l'essai d'implants pour le bas du corps de Triolo, auraient pu perdre l'accès à la technologie qui était devenue une partie intégrante de leur vie. Mais Peckham et Triolo ont refusé que cela se produise.
"Nous avons compris que s'il y avait quelque chose dont ils bénéficiaient, si on leur enlevait cela, ce serait une nouvelle perte pour eux - alors qu'ils avaient déjà subi une perte si dévastatrice auparavant", explique M. Peckham.
En utilisant d'anciens stocks de composants qui s'amenuisent - y compris des articles que l'université a acquis après la disparition du fabricant du Freehand - et en puisant dans les subventions universitaires, les chercheurs continuent à aider le plus grand nombre possible de personnes à utiliser ces appareils.
Pendant deux décennies, les appareils Freehand ont été réparés au fur et à mesure qu'ils tombaient en panne, et le financement d'une succession d'autres essais cliniques à durée déterminée a permis à M. Triolo de continuer à soutenir Mme French et ses collègues participants à la recherche. Il a même pu leur proposer des améliorations au fil du temps. Le système de Mme French est tombé en panne quatre fois, la laissant incapable de se tenir debout et très consciente de sa dépendance à l'égard de la technologie. À chaque fois, l'équipe de Case Western a fourni l'intervention chirurgicale et les pièces nécessaires pour rétablir ses mouvements.
"Quelqu'un consacre son corps à notre recherche. Nous avons l'obligation de maintenir leurs systèmes aussi longtemps qu'ils veulent les utiliser".
Mme French sait que sa situation est précaire et qu'elle dépend de la capacité de Triolo à attirer des financements. "Je vis tous les jours avec l'idée que cette technologie pourrait disparaître", dit-elle. Mais elle se réjouit de ce qu'elle considère comme l'engagement indéfectible des chercheurs à son égard.
"Notre point de vue, explique M. Triolo, est que quelqu'un consacre son corps à l'avancement de notre recherche et que nous avons l'obligation de maintenir ses systèmes aussi longtemps qu'il souhaite les utiliser.

Protection contre les défaillances
Konstantin Slavin est neurochirurgien à la faculté de médecine de l'université de l'Illinois à Chicago. Il a participé aux essais cliniques du dispositif d'ATI pour les céphalées en grappe et a implanté le stimulateur de la moelle épinière fabriqué par Nuvectra. Il pense que toute personne à qui l'on implante un dispositif dans le cadre de soins cliniques de routine devrait pouvoir compter sur un soutien continu. "On s'attend à ce qu'ils reçoivent essentiellement des soins à vie de la part du fabricant de l'appareil", déclare-t-il.
Il n'est pas le seul à penser ainsi : tous les utilisateurs d'appareils, les médecins et les ingénieurs interrogés par Nature estiment que les gens doivent être mieux protégés contre les défaillances des fabricants d'appareils.
"Vous vous attendez à ce qu'ils reçoivent essentiellement des soins à vie de la part du fabricant de l'appareil.
L'une des propositions est que les entreprises de neurotechnologie veillent à ce qu'il y ait de l'argent disponible pour soutenir les personnes qui utilisent leurs appareils en cas de fermeture de l'entreprise. La meilleure façon d'y parvenir est incertaine. Il est suggéré que l'entreprise crée une organisation partenaire à but non lucratif pour gérer les fonds destinés à couvrir cette éventualité, qu'elle mette de l'argent de côté sur un compte bloqué, qu'elle soit obligée de souscrire une police d'assurance qui soutiendrait les utilisateurs, qu'elle contribue à un réseau de sécurité soutenu par le gouvernement ou qu'elle s'assure que les personnes utilisant les appareils sont des créanciers prioritaires lors d'une procédure de faillite.
À l'heure actuelle, rien n'indique que les fabricants d'appareils prennent ce type de mesures. Interrogé en juillet sur le fait de savoir si Realeve avait mis en place des plans de protection des personnes au cas où ses activités connaîtraient le même sort que celles d'ATI, M. Snyder, alors directeur général, a répondu : "Il y a toujours un risque qu'une entreprise cesse ses activités : "Il y a toujours un risque qu'une entreprise cesse ses activités, mais notre objectif est de réussir à fournir aux patients le traitement Realeve Pulsante".
M. Donato, directeur général par intérim de Realeve, pense qu'il faudra une législation pour convaincre les investisseurs ou les actionnaires des entreprises d'assumer les frais d'un filet de sécurité. "À moins que les gouvernements ne nous l'imposent, dit-il, je ne suis pas sûr que les entreprises le feront d'elles-mêmes. Mais M. Triolo est optimiste et pense que les fabricants pourraient penser différemment si les risques encourus par les utilisateurs d'appareils devenaient plus largement connus et si les médecins et les patients potentiels commençaient à privilégier les entreprises qui ont mis en place un filet de sécurité. "Si c'est ce qu'il faut pour avoir un avantage concurrentiel, peut-être que cela éclairera nos amis du côté commercial", déclare M. Triolo.
En effet, les échecs de plusieurs start-ups spécialisées dans les neurotechnologies au cours des dernières années incitent déjà les chirurgiens chargés d'implanter les dispositifs à la prudence.
Robert Levy, neurochirurgien à Boca Raton, en Floride, et ancien président de la Société internationale de neuromodulation, a été particulièrement échaudé par la disparition de Nuvectra. Il avait été suffisamment impressionné par sa technologie pour devenir président du comité consultatif médical de la société en août 2016. Mais en 2019, environ cinq mois avant que Nuvectra ne dépose le bilan, il a coupé les ponts après ce que lui et d'autres personnes anciennement associées à la société ont considéré comme le fait que l'entreprise négligeait les besoins des personnes utilisant l'implant dans sa tentative de rester à flot. "Tous ceux d'entre nous qui étaient associés à l'entreprise à l'époque ont exprimé leur profond mécontentement face à une telle décision, que nous jugions contraire à l'éthique", explique M. Levy.
"Faire des patients les victimes de mauvaises pratiques commerciales ou d'une faillite est horrible pour eux, horrible pour le secteur et tout à fait contraire à l'éthique.
Dorénavant, M. Levy exige de toute nouvelle entreprise qui lui demande d'implanter son produit qu'elle lui envoie une lettre garantissant le soutien des personnes opérées si quelque chose arrivait à l'entreprise. "S'ils ne fournissent pas une telle lettre, ils ne seront pas inclus dans ma pratique", déclare-t-il.
Il envisage de rédiger un éditorial en faveur de cette approche dans la revue Neuromodulation, dont il est le rédacteur en chef, afin de sensibiliser davantage et de faire pression sur les entreprises de neurotechnologie. "Les patients souffrent terriblement", déclare-t-il. "En faire les victimes de mauvaises pratiques commerciales ou d'une faillite est horrible pour les patients, horrible pour le secteur et tout à fait contraire à l'éthique.
Un autre moyen de protéger les personnes porteuses d'implants est en train de prendre de l'ampleur : la normalisation technique. Les électrodes, les connecteurs, les circuits programmables et les blocs d'alimentation utilisés dans la neurotechnologie implantée sont souvent propriétaires ou difficiles à trouver, comme l'a découvert M. Möllmann-Bohle lorsqu'il cherchait des pièces de rechange pour son stimulateur. Si les composants étaient communs à tous les appareils, un fabricant pourrait être en mesure d'intervenir et de proposer des pièces de rechange lorsqu'un autre fait faillite.
Une enquête menée en 2021 auprès des chirurgiens qui implantent des neurostimulateurs a montré que 86 % d'entre eux étaient favorables à la normalisation des connecteurs utilisés par ces dispositifs.2. Selon Richard North, neurochirurgien à la retraite et ingénieur en dispositifs médicaux, anciennement à la Johns Hopkins Medical School de Baltimore et président de l'Institute of Neuromodulation de Chicago, qui a dirigé l'enquête, une telle mesure ne serait pas sans précédent. Les stimulateurs cardiaques comportent des éléments normalisés depuis le début des années 1990, lorsque les fabricants ont volontairement accepté de veiller à ce que l'alimentation électrique de n'importe quelle entreprise puisse alimenter un stimulateur cardiaque de n'importe quelle autre entreprise. Un grand nombre de ces mêmes entreprises sont aujourd'hui les plus grands noms des stimulateurs de la moelle épinière et des systèmes DBS.

"La normalisation est inévitable et je pense que les entreprises concernées le reconnaissent également.
M. North copréside actuellement un comité de normalisation des connecteurs pour la North American Neuromodulation Society, dont l'Institut de neuromodulation fait partie, qui promeut cette idée. Bien que l'industrie ne se soit pas précipitée pour adopter une normalisation plus poussée, il pense que ce n'est qu'une question de temps. "La normalisation est inévitable et je pense que les entreprises concernées le reconnaissent également", déclare-t-il. Outre le fait que les composants de remplacement seront plus faciles à trouver, M. North pense que la normalisation stimulera l'innovation en encourageant les entreprises à développer des composants pouvant être utilisés avec un large éventail de systèmes existants.
M. Peckham espère que le domaine de la neurotechnologie pourra aller encore plus loin : il souhaite que les dispositifs soient mis en open source. Sous les auspices de l'Institute for Functional Restoration, une organisation à but non lucratif que lui et ses collègues de Case Western ont créée en 2013, M. Peckham prévoit de mettre gratuitement à disposition les spécifications de conception et la documentation d'appui des nouvelles technologies implantables développées par son équipe. "Les gens n'auront plus qu'à faire du copier-coller", explique-t-il.
Il s'agit là d'un changement majeur par rapport à la nature propriétaire de la plupart des dispositifs actuels. M. Peckham espère que d'autres personnes s'appuieront sur cette technologie, voire l'adapteront à de nouvelles indications. Les avantages pour les utilisateurs de ces appareils sont au cœur de sa réflexion. "Cela commence par un engagement envers les patients, envers les personnes qui peuvent en bénéficier", déclare-t-il.
C'est exactement ce type d'engagement que des personnes comme Möllmann-Bohle, White et French veulent voir - et auquel elles pensent avoir droit. Une multitude de nouvelles entreprises développent des implants neurologiques de plus en plus sophistiqués qui ont le pouvoir de transformer la vie des gens. En cas d'échec de l'un d'entre eux, ce sont les utilisateurs de ces dispositifs et leurs médecins qui seront les plus touchés, estime M. Triolo.
La récente série de victimes commerciales démontre le coût humain de l'abandon des neurotechnologies. "Il est impossible, dit M. Triolo, que les gens ne sachent pas que le problème prend de plus en plus d'ampleur.
Références
- J. Schoenen et al. Cephalalgia 33, 816-830 (2013). Article
- R. B. North et al. Neuromodulation 24, 1299-1306 (2021). Article
Auteur : Liam Drew
Conception : Chris Ryan
Vidéo : Josh Birt, Colin Kelly, Adam Levy
Photographie originale : Nyani Quarmyne
Audio : Adam Levy
Rédacteurs multimédias : Adam Levy, Dan Fox
Rédactrices photo : Jessica Hallett, Madeline Hutchinson
Traduction : Shaya Zarrin
Sous-rédacteur : Jenny McCarthy
Chef de projet : Rebecca Jones
Rédacteur en chef : Richard Hodson
Cet article a été rédigé par Neil Savage et publié à l'origine dans Nature
L'inspiration peut venir de n'importe où. Pour Radhika Nagpal, elle est venue de sa lune de miel.
Mme Nagpal faisait de la plongée avec masque et tuba aux Bahamas lorsqu'elle a été approchée par un banc de poissons rayés colorés, qui se déplaçaient comme un seul homme. "Ils viennent droit sur vous, vous examinent, puis s'éloignent", raconte Nagpal, aujourd'hui ingénieur en mécanique à l'université de Princeton, dans le New Jersey. Je me suis dit : "Wow, c'est un comportement collectif que je n'avais jamais vu"": Robotique et intelligence artificielle
Son esprit est revenu à ces curieux poissons des années plus tard, alors qu'elle réfléchissait à la manière de construire des essaims de robots capables de coordonner leur comportement dans des environnements difficiles. Le résultat est un banc de poissons robotisés - appelés Bluebots - capables de coordonner leur activité avec celle de leurs congénères.1.
L'école de Nagpal est petite, elle ne compte que dix poissons aux capacités limitées. Les poissons sont équipés de LED bleues afin que leurs camarades puissent les repérer sous l'eau. Des règles simples dans leur programmation, comme nager vers la gauche lorsqu'ils voient un autre Bluebot, leur permettent de synchroniser leurs mouvements. M. Nagpal espère toutefois pouvoir créer à terme des collectifs plus vastes aux comportements plus complexes.
Ces écoles robotisées pourraient être chargées de localiser et d'enregistrer des données sur les récifs coralliens afin d'aider les chercheurs à étudier la santé des récifs au fil du temps. Tout comme les poissons vivants d'un banc peuvent adopter simultanément différents comportements - certains s'accouplent, d'autres s'occupent de leurs petits, d'autres encore cherchent de la nourriture - mais se déplacent soudain comme un seul homme à l'approche d'un prédateur, les robots-poissons devraient accomplir des tâches individuelles tout en communiquant entre eux lorsqu'il est temps de faire quelque chose de différent.
"La majeure partie des travaux de mon laboratoire porte sur les techniques de coordination : quels types d'algorithmes ont évolué dans la nature pour permettre aux systèmes de bien fonctionner ensemble ?
De nombreux roboticiens s'inspirent de la biologie pour concevoir des robots, en particulier dans le domaine de la locomotion. Bien que les gros robots industriels des usines de véhicules, par exemple, restent ancrés sur place, d'autres robots seront plus utiles s'ils peuvent se déplacer dans le monde, effectuer différentes tâches et coordonner leur comportement.
Certains robots peuvent déjà se déplacer sur des roues, mais les robots à roues ne peuvent pas monter les escaliers et sont gênés par les terrains accidentés ou mouvants, tels que le sable ou le gravier. En empruntant des stratégies de mouvement à la nature - marcher, ramper, nager, se glisser, voler ou sauter - les robots pourraient acquérir de nouvelles fonctionnalités. Ils pourraient effectuer des opérations de recherche et de sauvetage après un tremblement de terre, ou explorer des grottes trop petites ou instables pour que des personnes s'y aventurent. Ils pourraient effectuer des inspections sous-marines de navires et de ponts. Enfin, les véhicules aériens sans pilote (UAV) pourraient voler plus efficacement et mieux gérer les turbulences.
"L'idée de base est de s'inspirer de la nature pour voir comment les choses peuvent être faites différemment, comment nous pouvons améliorer nos systèmes automatisés", explique Michael Tolley, ingénieur en mécanique qui dirige le Bioinspired Robotics and Design Lab à l'université de Californie à San Diego.
Voir Spot run
La stratégie la plus évidente en matière de mouvement robotique est sans doute la marche, et il existe des robots à jambes. Spot, une machine basse à quatre pattes qui ressemble à un chien jaune sans tête, peut monter des côtes et emprunter des escaliers. Son concepteur, Boston Dynamics à Waltham (Massachusetts), commercialise cet appareil de 74 500 dollars pour l'inspection mobile des usines, des chantiers de construction et des environnements dangereux. Un robot d'apparence similaire, le Mini Cheetah, a été développé au Massachusetts Institute of Technology (MIT) à Cambridge. "Plus de 90 % des animaux terrestres sont quadrupèdes", explique Sangbae Kim, ingénieur mécanicien au MIT, qui a participé à la conception du Mini Cheetah. "Il est donc naturel de s'intéresser au monde des quadrupèdes. Et le guépard est le roi de ce monde en termes de vitesse." Abonnez-vous àla lettre d'information de Nature sur la robotique et l'IA
Le Mini Cheetah peut déjà effectuer des sauts périlleux et courir à une vitesse de 3,9 mètres par seconde, soit environ un dixième de la vitesse d'un vrai guépard, mais une vitesse élevée pour un robot. Kim développe actuellement un logiciel de contrôle qui, espère-t-il, permettra au robot de se déplacer en douceur sur différentes surfaces. Il s'agit d'un véritable défi, car les règles de déplacement d'un membre varient en fonction de la friction et de la dureté de la surface. Actuellement, le robot peut trébucher lorsqu'il passe de l'herbe au béton ou qu'il monte une colline caillouteuse. "Il se déplace de manière très laide et maladroite", explique Kim. "Il ne tombe pas, mais il n'est pas efficace.
Néanmoins, les robots quadrupèdes constituent l'une des meilleures options pour négocier des terrains difficiles, explique J. Sean Humbert, ingénieur mécanicien qui dirige le laboratoire de perception et de robotique bio-inspirée à l'université du Colorado, à Boulder. L'année dernière, son groupe a participé au Subterranean Challenge de l'Agence américaine pour les projets de recherche avancée de défense, dans le cadre duquel des robots étaient chargés de naviguer dans des tunnels, des grottes et des environnements urbains pour trouver des cibles particulières ; l'équipe a remporté la troisième place et a gagné 500 000 dollars. "Les robots qui ont obtenu de très bons résultats dans toutes les équipes étaient les robots à pattes", explique M. Humbert. Mais face à un paysage sablonneux, montagneux et rocailleux, ces robots ont eu du mal. "Même notre robot Spot s'est renversé et a glissé", explique-t-il.
Sentir la tension
Une solution possible, selon M. Humbert, consiste à doter les robots de la capacité innée des animaux à percevoir les informations mécanosensorielles, telles que la pression, la déformation ou les vibrations, et à y répondre. Il a adopté cette approche pour les machines volantes en intégrant des capteurs de contrainte dans les ailes des drones à voilure fixe, ainsi que dans les bras des drones quadrotors, qui s'appuient sur des pales en rotation pour voler et rester en vol stationnaire.
Ces travaux sont nés de l'étude des abeilles. Lorsque Humbert plaçait des abeilles dans une soufflerie et les frappait avec des rafales d'air soudaines, leur vol était momentanément perturbé. Après un changement rapide du rythme de leurs battements d'ailes, elles se remettaient d'aplomb. Les abeilles mellifères battent des ailes 251 fois par seconde, et les animaux peuvent effectuer ces corrections en seulement 15 à 20 battements, soit environ 0,08 seconde. "Nous en avons conclu qu'il devait s'agir d'informations mécanosensorielles", explique M. Humbert. "La vision n'est tout simplement pas assez rapide pour corriger les rotations que nous observons. Selon lui, si un drone pouvait détecter une perturbation de la même manière et la corriger automatiquement aussi rapidement, il risquerait beaucoup moins de s'écraser ou de dévier de sa trajectoire.

Les poissons réagissent également aux stimuli mécanosensoriels, en utilisant un système d'organes sensoriels connu sous le nom de ligne latérale. Cette structure se compose de centaines de minuscules capteurs répartis le long de la tête, du tronc et de la nageoire caudale. Elle permet aux poissons de percevoir les changements dans le mouvement et la pression de l'eau provoqués par des obstacles, tels que des rochers ou d'autres animaux. "Les poissons détectent tout cela et s'en servent, ainsi que de leur vision, pour se positionner les uns par rapport aux autres", explique M. Nagpal. Il n'existe pas de capteur de pression sous-marine comparable, mais son équipe espère en développer un pour améliorer la navigation des Bluebots.
À San Diego, M. Tolley étudie des robots construits à partir de polymères ou d'autres matériaux souples qui peuvent interagir avec les humains en toute sécurité ou se faufiler dans des espaces restreints. Les robots mous et flexibles pourraient avoir des mouvements plus souples que les robots durs dotés de quelques articulations seulement, mais il est difficile de les faire marcher sur des jambes molles.
Tolley a conçu un robot doté de quatre pattes souples, chacune divisée en trois chambres2. De l'air sous pression pénètre d'abord dans une chambre, puis passe dans la suivante. Ce mouvement entraîne la flexion des jambes, puis leur relâchement. En activant alternativement les paires de jambes opposées, le robot se déplace comme une tortue. Et comme il n'a pas besoin de commandes électroniques, sa conception pourrait être utile même en présence d'interférences électromagnétiques.
Qu'ils soient durs ou mous, les robots sont confrontés au problème de la chute. Si un robot de plusieurs millions de dollars trébuche sur un rocher sur Mars, c'est toute une mission qui risque d'être compromise. Certains chercheurs se tournent vers les insectes pour trouver des solutions, en particulier les coléoptères, qui peuvent sauter jusqu'à 20 fois la longueur de leur corps sans utiliser leurs pattes.3.
Les coléoptères cliqueurs utilisent un muscle pour comprimer les tissus mous, accumulant ainsi de l'énergie ; un système de loquet maintient les tissus comprimés en place. Lorsque l'animal relâche le loquet, produisant son cliquetis caractéristique, le tissu se dilate rapidement et le coléoptère est projeté dans les airs, accélérant à une vitesse environ 530 fois supérieure à la force de gravité. (À titre de comparaison, le passager d'une montagne russe subit généralement une force d'accélération quatre fois supérieure à celle de la pesanteur). Si un robot pouvait faire cela, il disposerait d'un mécanisme pour se redresser après avoir basculé, explique Aimy Wissa, ingénieur en mécanique et en aérospatiale qui dirige le Bio-inspired Adaptive Morphology Lab à Princeton.
Ce qui est encore plus intéressant, selon Wissa, c'est que le coléoptère peut effectuer cette manœuvre quatre ou cinq fois en succession rapide, sans subir de dommages apparents. Elle tente de développer des modèles qui expliquent comment l'énergie est rapidement dissipée sans nuire à l'insecte, ce qui pourrait s'avérer utile dans les applications impliquant une accélération et une décélération rapides, telles que les gilets pare-balles. D'autres créatures stockent et libèrent également de l'énergie pour déclencher des mouvements rapides, notamment les larves de mouches des fruits et les pièges à mouches de Vénus(Dionaea muscipula), et comprendre comment elles procèdent pourrait permettre de créer des muscles artificiels plus réactifs, selon Mme Tolley.
Totalement dépourvu de jambes
Dans certains endroits, comme les passages souterrains étroits ou les surfaces instables, les jambes pourraient prendre trop de place ou être trop instables pour propulser un robot. Howie Choset, informaticien au Robotics Institute de l'université Carnegie Mellon à Pittsburgh, en Pennsylvanie, construit des robots en forme de serpent dotés de 16 articulations qui offrent une gamme de mouvements pouvant aller des instruments chirurgicaux se déplaçant dans le corps à des robots de reconnaissance explorant des sites archéologiques.
Dans le cadre d'un de ses premiers projets, M. Choset a emmené ses robots-serpents en mer Rouge, où les anciens Égyptiens avaient creusé des grottes pour stocker les bateaux qu'ils avaient construits pour commercer avec le pays de Punt, que l'on pense être situé dans l'actuelle Somalie. Les grottes n'étaient plus sûres pour les explorateurs humains, mais les robots serpents semblaient bien adaptés à la tâche - jusqu'à ce qu'ils ne le soient plus. "La vérité, c'est que nous sommes restés bloqués", explique M. Choset. "Nous ne pouvions pas monter et descendre les pentes sablonneuses.
Pour savoir comment un vrai serpent aborderait le problème, Choset s'est tourné vers les sidewinders, des serpents qui se déplacent en poussant leur corps latéralement dans une courbe en forme de S, glissant ainsi facilement sur le sable.4. Le sable étant granuleux, il peut se comporter comme un liquide ou un solide, en fonction de la force appliquée. Choset a découvert que les personnes qui se déplacent latéralement peuvent exercer la bonne quantité de force de poussée pour que le sable reste solide sous elles et soutienne leur corps. "Ce n'est que lorsque nous avons commencé à étudier les vrais serpents, les sidewinders, et la manière dont ils se déplaçaient sur les terrains sablonneux que nous avons pu comprendre comment faire fonctionner notre robot sur les terrains sablonneux", explique-t-il.

Quant à Wissa, elle essaie de construire des robots capables de nager et de voler, en s'inspirant d'un animal qui peut faire les deux : le poisson volant.5. Ces créatures utilisent leurs nageoires pelviennes pour effleurer la surface de l'eau et s'élancer dans les airs, où ils peuvent planer jusqu'à 400 mètres.
Les poissons volants, explique Wissa, sont "en fait de très bons planeurs". Mais lorsqu'ils retombent dans l'eau, ils ne s'immergent pas. "Ils plongent leur nageoire caudale et la battent vigoureusement, ce qui leur permet de redécoller", explique M. Wissa. "Il s'agit en quelque sorte d'une manœuvre de roulage. Elle espère en apprendre suffisamment sur ce comportement pour mettre au point un robot capable de se déplacer dans l'air et dans l'eau en utilisant les mêmes mécanismes de propulsion. "En tant qu'ingénieurs, nous sommes très doués pour concevoir des objets à fonction unique", explique Mme Wissa. "Le concept de multifonctionnalité est un domaine dans lequel la nature peut nous apprendre beaucoup de choses.
Pour un autre type de locomotion multifonctionnelle, Wissa s'intéresse aux sauterelles, qui peuvent sauter puis ouvrir leurs ailes pour planer. Elle espère comprendre ce qui fait de ces sauterelles de si bons planeurs. De nombreux autres insectes ont recours à des battements d'ailes à haute fréquence pour voler. Selon elle, cela est peut-être lié à la forme de leurs ailes.

Wissa s'inspire également des oiseaux. Elle a utilisé des tests aérodynamiques et la modélisation structurelle pour étudier les plumes cachées - de petites plumes rigides qui se superposent à d'autres plumes sur les ailes et la queue d'un oiseau.6. Lorsqu'un oiseau tente d'atterrir dans des conditions venteuses, les plumes de couverture des ailes se déploient, soit passivement en réponse au flux d'air, soit activement sous le contrôle d'un tendon. Les plumes de couverture modifient la forme de l'aile et permettent à l'oiseau de mieux contrôler son interaction avec le flux d'air, tout en ne nécessitant pas autant d'énergie que le battement de l'aile entière. En apprenant à comprendre la physique de ces plumes, Wissa espère améliorer le vol d'un drone.
Une voie à double sens
La biologie a influencé la robotique, mais l'ingénierie impliquée peut également fournir des informations sur la kinésiologie animale. "Nous n'avons pas commencé par étudier la biologie", explique M. Choset. Il a plutôt modélisé mathématiquement les principes fondamentaux du mouvement qui l'intéressait. "Ce faisant, quelque chose de magique s'est produit : nous avons commencé à trouver des moyens d'expliquer le fonctionnement de la biologie. Alors, s'agit-il d'une biologie inspirée par les robots ou de robots inspirés par la biologie?
D'autres ingénieurs ont vécu des expériences similaires. Nagpal collabore avec l'ichtyologiste George Lauder, de l'université Harvard à Cambridge, pour modéliser l'hydrodynamique de la formation des bancs, afin de déterminer si cette formation apporte un avantage énergétique aux poissons vivants. Les modèles qui permettent aux drones de voler de manière plus efficace sur le plan énergétique pourraient aider à expliquer comment les oiseaux et les insectes ont évolué pour faire quelque chose de similaire. Mme Wissa espère que ses travaux, outre la construction de robots volants et nageurs, permettront de mieux comprendre les poissons volants. "Nous utilisons ce modèle pour tester des hypothèses sur la nature, sur les raisons pour lesquelles certaines espèces de poissons volants ont des nageoires pelviennes élargies et d'autres non", explique Mme Wissa.
Mais malgré les liens entre la biologie et l'ingénierie, il ne faut pas s'attendre à ce que les robots bio-inspirés ressemblent en fin de compte aux créatures qui les ont influencés. Selon Mme Wissa, bien que de nombreuses premières tentatives d'imitation de la biologie ressemblent aux formes biologiques originales, l'objectif ultime des scientifiques est de comprendre les principes qui sous-tendent le fonctionnement des systèmes, puis de les adapter à des structures et à des matériaux différents. "Nous ne faisons que copier la physique et les règles de fonctionnement des choses", explique-t-elle, "puis nous fabriquons des systèmes d'ingénierie qui remplissent la même fonction".
doi: https://doi.org/10.1038/d41586-022-03014-x
Cet article fait partie de Nature Outlook : Robotique et intelligence artificielle, un supplément indépendant sur le plan éditorial, produit avec le soutien financier de tiers. À propos de ce contenu.
Références
- Berlinger, F., Gauci, M. & Nagpal, R. Sci. Robot. 6, eabd8668 (2021).Article PubMed Google Scholar
- Drotman, D., Jadhav, S., Sharp, D., Chan, C. & Tolley, M. T. Sci. Robot. 6, eaay2627 (2021).Article PubMed Google Scholar
- Bolmin, O. et al. Proc. Natl Acad. Sci. USA 118, e2014569118 (2021).Article PubMed Google Scholar
- Chaohui Gong, R., Hatton, L. & Choset, H. In 2012 IEEE International Conference on Robotics and Automation 4222-4227 (2012).
- Saro-Cortes, V. et al. Integr. Comp. Biol. https://doi.org/10.1093/icb/icac101 (2022).Article Google Scholar
- Duan, C. & Wissa, A. Bioinspir. Biomim. 16, 046020 (2021).Article Google Scholar
Cet article a été rédigé par Anthony King et publié à l'origine dans Nature
Les médicaments anticancéreux sont généralement utilisés de façon dispersée. Les chimiothérapies touchent inévitablement les cellules saines tout en détruisant les tumeurs, ce qui entraîne une série d'effets secondaires. Il est également difficile pour un médicament anticancéreux de trouver et de détruire une tumeur entière - certaines sont difficiles à atteindre, ou difficiles à pénétrer une fois qu'elles sont localisées.
L'injection d'un bataillon de minuscules robots dans une personne atteinte d'un cancer est une alternative dont on rêve depuis longtemps. Ces machines miniatures pourraient naviguer directement vers une tumeur et déployer intelligemment une charge thérapeutique là où elle est nécessaire. "Il est très difficile pour les médicaments de franchir les barrières biologiques, telles que la barrière hémato-encéphalique ou le mucus de l'intestin, mais un microrobot peut le faire", explique Wei Gao, ingénieur médical à l'Institut de technologie de Californie à Pasadena.
Partie de Nature Outlook : Robotique et intelligence artificielle
Il s'est notamment inspiré du film Fantastic Voyage de 1966, dans lequel un sous-marin miniaturisé part en mission pour retirer un caillot de sang dans le cerveau d'un scientifique, piloté à travers la circulation sanguine par un équipage tout aussi réduit. Bien que la majeure partie du film relève de la science-fiction, les progrès réalisés ces dix dernières années dans le domaine des machines médicales miniatures ont permis d'expérimenter pour la première fois sur des animaux.
Il existe aujourd'hui de nombreux robots à l'échelle du micromètre et du nanomètre qui peuvent se propulser dans des milieux biologiques, tels que la matrice entre les cellules et le contenu du tractus gastro-intestinal. Certains sont déplacés et dirigés par des forces extérieures, telles que les champs magnétiques et les ultrasons. D'autres sont mus par des moteurs chimiques embarqués, et certains sont même construits sur des bactéries et des cellules humaines pour tirer parti de la capacité intrinsèque de ces cellules à se déplacer. Quelle que soit la source de propulsion, on espère que ces minuscules robots seront capables d'administrer des thérapies à des endroits qu'un médicament seul ne pourrait pas atteindre, par exemple au centre des tumeurs solides. Cependant, même si les personnes travaillant sur les nano- et microrobots médicaux commencent à collaborer plus étroitement avec les cliniciens, il est clair que la technologie a encore un long chemin à parcourir dans son fantastique voyage vers la clinique.
La poésie en mouvement
L'un des principaux défis pour un robot opérant à l'intérieur du corps humain est de se déplacer. Dans Le Voyage fantastique, l'équipage utilise les vaisseaux sanguins pour se déplacer dans le corps. Cependant, c'est ici que la réalité doit immédiatement diverger de la fiction. "J'adore le film", déclare le roboticien Bradley Nelson, en montrant une copie du film dans son bureau de l'École polytechnique fédérale de Zurich (EPFZ), en Suisse. "Mais la physique est épouvantable. Les minuscules robots auraient beaucoup de mal à nager contre le flux sanguin, ajoute-t-il. Au lieu de cela, ils seront d'abord administrés localement, puis se déplaceront vers leurs cibles sur de courtes distances.
En matière de conception, la taille compte. "La propulsion dans les milieux biologiques est d'autant plus facile que la taille est petite, car en dessous d'un micron, les robots glissent entre les réseaux de macromolécules", explique Peer Fischer, chercheur en robotique à l'Institut Max Planck pour les systèmes intelligents de Stuttgart, en Allemagne. Les robots ne mesurent donc généralement pas plus de 1 à 2 micromètres de diamètre. Cependant, la plupart ne descendent pas en dessous de 300 nanomètres. Au-delà de cette taille, il devient plus difficile de les détecter et de les suivre dans les milieux biologiques, ainsi que de générer une force suffisante pour les déplacer.
Les scientifiques ont plusieurs possibilités pour faire bouger leurs robots. Certains optent pour une alimentation externe. Par exemple, en 2009, M. Fischer, qui travaillait à l'époque à l'université Harvard de Cambridge, dans le Massachusetts, avec son collègue Ambarish Ghosh, spécialiste de la nanorobotique, a conçu une hélice en verre d'une longueur de 1 à 2 micromètres seulement, qui pouvait être mise en rotation par un champ magnétique.1. Cela permettait à la structure de se déplacer dans l'eau et, en ajustant le champ magnétique, elle pouvait être dirigée avec une précision de l'ordre du micromètre. Dans une étude de 20182Fischer a lancé un essaim de micropropulseurs dans l'œil d'un porc in vitro et les a fait voyager sur des distances centimétriques à travers l'humeur vitrée semblable à un gel jusqu'à la rétine - une démonstration rare de propulsion à travers un tissu réel. L'essaim a pu se faufiler dans le réseau de biopolymères de l'humeur vitrée grâce, en partie, à un revêtement d'huile de silicone et de fluorocarbone appliqué sur chaque hélice. Inspiré par la surface glissante que la sarracénie carnivore Nepenthes utilise pour attraper les insectes, ce revêtement minimise les interactions entre les micropropulseurs et les biopolymères.

L'utilisation d'ultrasons est une autre façon de fournir une propulsion à partir de l'extérieur du corps. Un groupe a placé des noyaux magnétiques à l'intérieur des membranes des globules rouges3qui transportent également des composés photoréactifs et de l'oxygène. La forme biconcave particulière des cellules et leur densité supérieure à celle des autres composants sanguins ont permis de les propulser à l'aide de l'énergie ultrasonique, un champ magnétique externe agissant sur le noyau métallique pour assurer la direction. Une fois les robots en position, la lumière peut exciter le composé photosensible, qui transfère l'énergie à l'oxygène et génère des espèces réactives de l'oxygène pour endommager les cellules cancéreuses.
Ce détournement de cellules s'avère avoir des vertus thérapeutiques dans d'autres projets de recherche. Certaines des stratégies les plus prometteuses pour le traitement des tumeurs solides font appel à des cellules humaines et à d'autres organismes unicellulaires auxquels on ajoute des éléments synthétiques. En Allemagne, un groupe dirigé par Oliver Schmidt, chercheur en nanosciences à l'université de technologie de Chemnitz, a conçu un robot biohybride à base de spermatozoïdes.4. Il s'agit de cellules mobiles parmi les plus rapides, capables d'atteindre une vitesse de 5 millimètres par minute, explique M. Schmidt. L'espoir est que ces puissants nageurs puissent être exploités pour délivrer des médicaments aux tumeurs de l'appareil génital féminin, guidés par des champs magnétiques. Il a déjà été démontré qu'ils peuvent être guidés magnétiquement jusqu'à une tumeur modèle dans une boîte de Pétri.
Crédit : Leibniz IFW, Dresde
"Nous pourrions charger efficacement des médicaments anticancéreux dans la tête du spermatozoïde, dans l'ADN", explique M. Schmidt. "Le spermatozoïde peut alors fusionner avec d'autres cellules lorsqu'il les heurte. À l'université chinoise de Hong Kong, le nanoroboïste Li Zhang a créé des micro-nageurs à partir de microalgues Spirulina recouvertes de magnétite minérale. L'équipe a ensuite suivi un essaim de ces nageurs à l'intérieur de l'estomac de rongeurs en utilisant l'imagerie par résonance magnétique.5. Les biohybrides se sont révélés capables de cibler sélectivement les cellules cancéreuses. Ils se dégradent également progressivement, réduisant ainsi la toxicité indésirable.
Une autre façon de faire bouger les micro- et nanorobots est de les équiper d'un moteur chimique : un catalyseur entraîne une réaction chimique, créant un gradient d'un côté de la machine pour générer la propulsion. Samuel Sánchez, chimiste à l'Institut de bio-ingénierie de Catalogne à Barcelone, en Espagne, met au point des nanomoteurs animés par des réactions chimiques pour le traitement du cancer de la vessie. Certains des premiers dispositifs utilisaient le peroxyde d'hydrogène comme carburant. Sa décomposition, favorisée par le platine, générait des bulles de gaz d'eau et d'oxygène pour la propulsion. Mais le peroxyde d'hydrogène est toxique pour les cellules, même en quantités infimes, et M. Sánchez a donc opté pour des matériaux plus sûrs. Ses derniers nanomoteurs sont constitués de nanoparticules de silice en nid d'abeille, de minuscules particules d'or et de l'enzyme uréase6. Ces robots de 300 à 400 nm sont mus par la décomposition chimique de l'urée dans la vessie en dioxyde de carbone et en ammoniac, et ont été testés dans la vessie de souris. "Nous pouvons maintenant les déplacer et les voir à l'intérieur d'un système vivant", explique M. Sánchez.
La rupture
Le traitement standard du cancer de la vessie est la chirurgie, suivie d'une immunothérapie sous forme de perfusion d'une souche affaiblie de la bactérie Mycobacterium bovis dans la vessie, afin de prévenir les récidives. Cette bactérie active le système immunitaire de la personne et constitue également la base du vaccin BCG contre la tuberculose. "Les cliniciens nous disent que c'est l'une des rares choses qui n'a pas changé au cours des 60 dernières années", explique M. Sánchez. Selon son collaborateur, l'oncologue urologue Antoni Vilaseca de l'Hospital Clinic de Barcelone, il est nécessaire d'améliorer le BCG en oncologie. Les traitements actuels réduisent les récidives et la progression, "mais nous n'avons pas amélioré la survie", déclare Vilaseca. "Nos patients continuent de mourir.
L'approche des nanorobots tentée par Sánchez promet une livraison de précision. Il prévoit d'insérer ses robots dans la vessie (ou par voie intraveineuse), de les diriger vers le cancer avec leur cargaison d'agents thérapeutiques pour cibler les cellules cancéreuses, en utilisant de l'urée en abondance comme carburant. Il pourrait utiliser un champ magnétique pour le guidage, si nécessaire, mais un remplacement plus simple du BCG par des bots ne nécessitant pas de contrôle externe, peut-être en utilisant un anticorps pour lier un marqueur tumoral, plairait le plus aux cliniciens. "Si nous pouvons administrer notre traitement uniquement aux cellules tumorales, nous pourrons réduire les effets secondaires et augmenter l'activité", explique M. Vilaseca.
Cependant, il n'est pas possible d'atteindre tous les cancers en nageant dans un liquide. Des barrières physiologiques naturelles peuvent empêcher l'administration efficace de médicaments. La paroi intestinale, par exemple, permet l'absorption des nutriments dans la circulation sanguine et offre un moyen d'introduire les thérapies dans l'organisme. "Le tractus gastro-intestinal est la porte d'entrée de notre corps", explique Joseph Wang, ingénieur en nanotechnologies à l'université de Californie à San Diego. Cependant, une combinaison de cellules, de microbes et de mucus empêche de nombreuses particules d'accéder au reste de l'organisme. Pour administrer certaines thérapies, il ne suffit pas d'être dans l'intestin : il faut aussi qu'elles puissent traverser ses défenses pour atteindre la circulation sanguine, et une nanomachine pourrait y contribuer.
En 2015, Wang et ses collègues, dont Gao, ont présenté le premier robot autopropulsé in vivo, à l'intérieur de l'estomac d'une souris7. Leur nanomoteur à base de zinc s'est dissous dans les acides gastriques agressifs, produisant des bulles d'hydrogène qui ont propulsé le robot vers l'avant. Dans le tractus gastro-intestinal inférieur, ils utilisent plutôt du magnésium. "Le magnésium réagit avec l'eau pour produire une bulle d'hydrogène", explique Wang. Dans les deux cas, les micromoteurs métalliques sont encapsulés dans un revêtement qui se dissout au bon endroit, libérant le micromoteur pour propulser le robot dans la paroi muqueuse.
Certaines bactéries ont déjà trouvé leurs propres moyens de se faufiler à travers la paroi de l'intestin. Helicobacter pylori, qui provoque une inflammation de l'estomac, excrète des enzymes uréases qui génèrent de l'ammoniac et liquéfient l'épais mucus qui tapisse la paroi de l'estomac. M. Fischer envisage que les futurs micro- et nanorobots empruntent cette approche pour délivrer des médicaments à travers l'intestin.
Inscrivez-vous à la lettre d'information de Nature sur la robotique et l'IA
Les tumeurs solides sont un autre endroit où il est difficile d'administrer un médicament. Au fur et à mesure que ces tumeurs malignes se développent, un appétit vorace pour l'oxygène favorise l'apparition d'une surface extérieure couverte de vaisseaux sanguins, tandis qu'un noyau privé d'oxygène s'accumule à l'intérieur. Les faibles niveaux d'oxygène forcent les cellules à l'intérieur à passer au métabolisme anaérobie et à produire de l'acide lactique, créant ainsi des conditions acides. À mesure que le gradient d'oxygène augmente, la tumeur devient de plus en plus difficile à pénétrer. Les médicaments à base de nanoparticules n'ont pas la force nécessaire pour franchir les fortifications d'une tumeur et, en général, moins de 2 % d'entre eux y parviennent.8. Les partisans des nanomachines pensent pouvoir faire mieux.
Sylvain Martel, nanorobotisseur à l'École polytechnique de Montréal au Canada, tente de pénétrer dans les tumeurs solides en utilisant des bactéries qui contiennent naturellement une chaîne de nanocristaux magnétiques d'oxyde de fer. Dans la nature, ces espèces de Magnetococcus recherchent des régions à faible teneur en oxygène. Martel a conçu une telle bactérie pour cibler les cellules cancéreuses actives à l'intérieur des tumeurs.8. "Nous les guidons à l'aide d'un champ magnétique vers la tumeur", explique Martel, en tirant parti des cristaux magnétiques que les bactéries utilisent généralement comme une boussole pour s'orienter. L'emplacement précis des régions à faible teneur en oxygène est incertain, même avec l'imagerie, mais une fois que ces bactéries atteignent le bon endroit, leur capacité autonome se met en marche et elles se dirigent vers les régions à faible teneur en oxygène. Chez une souris, plus de la moitié des bactéries injectées à proximité de greffons tumoraux ont pénétré dans cette région tumorale, chacune chargée de dizaines de liposomes médicamenteux. M. Martel prévient toutefois qu'il reste encore du chemin à parcourir avant que cette technologie ne s'avère sûre et efficace pour le traitement des personnes atteintes d'un cancer.
Aux Pays-Bas, la chimiste Daniela Wilson, de l'université Radboud de Nimègue, et ses collègues ont mis au point des nanomoteurs enzymatiques alimentés par l'ADN qui pourraient, de la même manière, être capables de s'introduire de manière autonome dans les cellules tumorales.9. Les moteurs se dirigent vers des zones plus riches en ADN, telles que les cellules tumorales en cours d'apoptose. "Nous voulons créer des systèmes capables de détecter les gradients de différents carburants endogènes dans le corps", explique M. Wilson, suggérant que les niveaux plus élevés d'acide lactique ou de glucose que l'on trouve généralement dans les tumeurs pourraient également être utilisés pour le ciblage. Une fois en place, les robots autonomes semblent être captés par les cellules plus facilement que les particules passives, peut-être parce que les robots poussent contre les cellules.

Fiction et réalité
Si Fantastic Voyage a été une source d'inspiration pour de nombreuses personnes travaillant dans le domaine de la nanorobotique médicale, certains pensent que le film est devenu un fardeau. "Les gens pensent que c'est de la science-fiction, ce qui les excite, mais d'un autre côté, ils ne prennent pas cela au sérieux", déclare Martel. M. Fischer est lui aussi blasé par l'engouement suscité par le film. "Les gens écrivent parfois de manière très libérale que les nanorobots pour le traitement du cancer sont sur le point d'arriver", déclare-t-il. "Mais il n'y a même pas encore d'essais cliniques en cours.
Néanmoins, les progrès réalisés au cours des dix dernières années ont accru les attentes quant aux possibilités offertes par la technologie actuelle. "Il n'y a rien de plus amusant que de construire une machine et de la regarder bouger. C'est un vrai plaisir", déclare Nelson. Mais voir quelque chose s'agiter sous un microscope n'a plus le même attrait, en l'absence de contexte médical. "On commence à se demander en quoi cela pourrait être utile à la société", ajoute-t-il.
Plus d'informations sur les perspectives de la nature
C'est pourquoi de nombreux chercheurs qui créent des nanorobots à des fins médicales collaborent plus étroitement que jamais avec des cliniciens. "On trouve beaucoup de jeunes médecins qui s'intéressent vraiment à ce que les nouvelles technologies peuvent faire", explique M. Nelson. Le neurologue Philipp Gruber, qui s'occupe de patients victimes d'accidents vasculaires cérébraux à l'hôpital cantonal d'Aarau en Suisse, a entamé une collaboration avec Nelson il y a deux ans, après avoir contacté l'ETH Zurich. Les deux hommes partagent l'ambition d'utiliser des microbots orientables pour dissoudre les caillots dans le cerveau des personnes ayant subi un accident vasculaire cérébral ischémique, soit mécaniquement, soit en administrant un médicament. "Brad sait tout de l'ingénierie", déclare Gruber, "mais nous pouvons le conseiller sur les problèmes que nous rencontrons en clinique et sur les limites des options thérapeutiques actuelles".
Sánchez raconte une histoire similaire : s'il a commencé à parler aux médecins il y a une dizaine d'années, leur intérêt s'est considérablement accru depuis que ses expériences sur les animaux ont débuté il y a trois ou quatre ans. "Nous sommes encore en laboratoire, mais au moins nous travaillons avec des cellules et des organoïdes humains, ce qui est un pas en avant", déclare son collaborateur Vilaseca.
Au fur et à mesure que ces collaborations cliniques prennent racine, il est probable que les applications oncologiques seront les plus précoces - en particulier celles qui ressemblent aux traitements actuels, comme l'infusion de microbots à la place du BCG dans les vessies cancéreuses. Mais même ces utilisations thérapeutiques ne sont probablement pas envisageables avant au moins 7 à 10 ans. À plus court terme, les nanorobots pourraient être utilisés pour accomplir des tâches plus simples, selon ceux qui suivent le domaine de près.
Par exemple, Martin Pumera, nanorobotiste à l'université de chimie et de technologie de Prague, souhaite améliorer les soins dentaires en plaçant des nanorobots sous les implants dentaires en titane.10. Le minuscule espace entre les implants métalliques et le tissu gingival est une niche idéale pour la formation de biofilms bactériens, qui déclenchent des infections et des inflammations. Lorsque cela se produit, il faut souvent retirer l'implant, nettoyer la zone et poser un nouvel implant - une procédure coûteuse et douloureuse. Il collabore avec le chirurgien-dentiste Karel Klíma de l'université Charles de Prague.
Un autre problème auquel les deux chercheurs s'attaquent est celui des bactéries buccales qui accèdent aux tissus lors d'interventions chirurgicales sur les mâchoires et le visage. "Un biofilm peut s'établir très rapidement, ce qui peut nécessiter le retrait de plaques et de vis en titane après l'opération, avant même la guérison d'une fracture", explique M. Klíma. Un robot en oxyde de titane pourrait être administré aux implants à l'aide d'une seringue, puis activé chimiquement ou par la lumière pour générer des espèces actives d'oxygène afin de tuer les bactéries. Des exemples de quelques micromètres de longueur ont été construits jusqu'à présent, mais des robots beaucoup plus petits - de quelques centaines de nanomètres seulement - sont l'objectif ultime.
Il est clair que l'on est loin du parachutage de robots dans des tumeurs difficiles à atteindre au plus profond d'une personne. Mais la vague croissante d'expériences in vivo et l'implication de plus en plus grande des cliniciens suggèrent que les microrobots pourraient bien être en train de quitter le port pour leur long voyage vers la clinique.
doi: https://doi.org/10.1038/d41586-022-00859-0
Cet article fait partie de Nature Outlook : Robotique et intelligence artificielle, un supplément indépendant sur le plan éditorial, produit avec le soutien financier de tiers. À propos de ce contenu.
Références
- Ghosh, A. & Fischer, P. Nano Lett. 9, 2243-2245 (2009).PubMed Article Google Scholar
- Wu, Z. et al. Sci. Adv. 4, eaat4388 (2018).PubMed Article Google Scholar
- Gao, C. et al. ACS Appl. Mater. Interfaces 11, 23392-23400 (2019).PubMed Article Google Scholar
- Xu, H. et al. ACS Nano 12, 327-337 (2018).PubMed Article Google Scholar
- Yan, X. et al. Sci. Robot. 2, eaaq1155 (2017).PubMed Article Google Scholar
- Hortelao, A. C. et al. Sci. Robot. 6, eabd2823 (2021).PubMed Article Google Scholar
- Gao, W. et al. ACS Nano 9, 117-123 (2015).PubMed Article Google Scholar
- Felfoul, O. et al. Nature Nanotechnol. 11, 941-947 (2016).PubMed Article Google Scholar
- Ye, Y. et al. Nano Lett. 21, 8086-8094 (2021).PubMed Article Google Scholar
- Villa, K. et al. Cell Rep. Phys. Sci. 1, 100181 (2020).Article Google Scholar
Cet article a été rédigé par Neil Savage et publié à l'origine dans Nature
Bing Liu était en train de tester une voiture autonome sur la route, quand soudain quelque chose a mal tourné. Le véhicule fonctionnait sans problème jusqu'à ce qu'il atteigne un carrefour en T et refuse de bouger. Bing Liu et les autres occupants de la voiture étaient déconcertés. La route sur laquelle ils se trouvaient était déserte, sans piétons ni autres voitures en vue. "Nous avons regardé autour de nous, nous n'avons rien remarqué à l'avant, ni à l'arrière. Il n'y avait rien", raconte Liu, ingénieur informaticien à l'université de l'Illinois à Chicago.
Déconcertés, les ingénieurs ont pris le contrôle du véhicule et sont retournés au laboratoire pour faire le point sur le voyage. Ils ont découvert que la voiture avait été arrêtée par un caillou sur la route. Ce n'était pas quelque chose qu'une personne aurait pu remarquer, mais lorsqu'il est apparu sur les capteurs de la voiture, il a été enregistré comme un objet inconnu - quelque chose que le système d'intelligence artificielle (IA) qui conduisait la voiture n'avait jamais rencontré auparavant.
Partie de Nature Outlook : Robotique et intelligence artificielle
Le problème n'était pas lié à l'algorithme de l'IA en tant que tel - il fonctionnait comme prévu, s'arrêtant à proximité de l'objet inconnu par mesure de sécurité. Le problème était qu'une fois que l'IA avait terminé son entraînement, en utilisant des simulations pour développer un modèle qui lui permettait de faire la différence entre une route dégagée et un obstacle, elle ne pouvait plus rien apprendre. Lorsqu'elle rencontrait quelque chose qui ne faisait pas partie de ses données d'entraînement, comme un caillou ou même une tache sombre sur la route, l'IA ne savait pas comment réagir. Les gens peuvent s'appuyer sur ce qu'ils ont appris et s'adapter à l'évolution de leur environnement ; la plupart des systèmes d'IA sont enfermés dans ce qu'ils savent déjà.
Dans le monde réel, bien sûr, des situations inattendues surviennent inévitablement. C'est pourquoi Liu affirme que tout système visant à effectuer des tâches apprises en dehors d'un laboratoire doit être capable d'apprendre sur le tas, c'est-à-dire de compléter le modèle qu'il a déjà développé avec les nouvelles données qu'il rencontre. La voiture pourrait, par exemple, détecter une autre voiture traversant sans problème une zone sombre de la route et décider de l'imiter, apprenant par la même occasion qu'une partie humide de la route ne pose pas de problème. Dans le cas du caillou, il pourrait utiliser une interface vocale pour demander à l'occupant de la voiture ce qu'il doit faire. Si le conducteur répond qu'il peut continuer en toute sécurité, la voiture peut continuer à rouler, et le système peut ensuite s'appuyer sur cette réponse lors de la prochaine rencontre avec un caillou. "Si le système peut apprendre en permanence, ce problème est facilement résolu", explique M. Liu.

Cet apprentissage continu, également appelé apprentissage tout au long de la vie, constitue la prochaine étape de l'évolution de l'IA. Une grande partie de l'IA repose sur les réseaux neuronaux, qui prennent des données et les font passer par une série d'unités de calcul, appelées neurones artificiels, qui exécutent de petites fonctions mathématiques sur les données. Le réseau finit par élaborer un modèle statistique des données qu'il peut ensuite adapter à de nouvelles entrées. Les chercheurs, qui ont basé ces réseaux neuronaux sur le fonctionnement du cerveau humain, se tournent à nouveau vers l'homme pour s'inspirer de la manière de créer des systèmes d'intelligence artificielle capables de continuer à apprendre au fur et à mesure qu'ils rencontrent de nouvelles informations. Certains groupes tentent de rendre les neurones informatiques plus complexes afin qu'ils ressemblent davantage aux neurones des organismes vivants. D'autres imitent la croissance de nouveaux neurones chez l'homme afin que les machines puissent réagir aux nouvelles expériences. D'autres encore simulent des états de rêve pour surmonter le problème de l'oubli. L'apprentissage tout au long de la vie est nécessaire non seulement pour les voitures autonomes, mais aussi pour tout système intelligent qui doit faire face à des surprises, comme les chatbots, qui sont censés répondre à des questions sur un produit ou un service, et les robots qui peuvent se déplacer librement et interagir avec les humains. Dhireesha Kudithipudi, informaticien qui dirige le MATRIX AI Consortium for Human Well-Being à l'université du Texas à San Antonio, estime que "dans pratiquement tous les cas où l'on déploiera l'IA à l'avenir, on constatera la nécessité d'un apprentissage tout au long de la vie".
L'apprentissage continu sera nécessaire pour que l'IA soit vraiment à la hauteur de son nom. À ce jour, l'IA n'est pas vraiment intelligente", déclare Hava Siegelmann, informaticienne à l'université du Massachusetts Amherst, qui a créé l'initiative de financement de la recherche "Lifelong Learning Machines" pour l'Agence américaine des projets de recherche avancée de défense. "S'il s'agit d'un réseau neuronal, vous l'entraînez à l'avance, vous lui donnez un ensemble de données et c'est tout. Il n'a pas la capacité de s'améliorer avec le temps".
Modélisation
Au cours de la dernière décennie, les ordinateurs sont devenus compétents dans des tâches telles que la classification de chats ou de tumeurs dans des images, l'identification de sentiments dans le langage écrit et la victoire aux échecs. Les chercheurs peuvent, par exemple, donner à l'ordinateur des photos qui ont été étiquetées par des humains comme contenant des chats. L'ordinateur reçoit les photos, qu'il interprète comme des descriptions numériques de pixels avec différentes valeurs de couleur et de luminosité, et les fait passer par des couches de neurones artificiels. Chaque neurone a un poids choisi au hasard, une valeur par laquelle il multiplie la valeur des données d'entrée. L'ordinateur fait passer les données d'entrée par les couches de neurones et vérifie les données de sortie par rapport aux données de validation afin de déterminer la précision des résultats. Il répète ensuite le processus, en modifiant les poids à chaque itération jusqu'à ce que la sortie atteigne un niveau de précision élevé. Ce processus produit un modèle statistique des valeurs et de l'emplacement des pixels qui définissent un chat. Le réseau peut alors analyser une nouvelle photo et décider si elle correspond au modèle, c'est-à-dire s'il y a un chat sur la photo. Mais ce modèle de chat, une fois élaboré, est pratiquement gravé dans le marbre.
Pour que l'ordinateur apprenne à identifier de nombreux objets, il faudrait développer de nombreux modèles. Vous pourriez entraîner un réseau neuronal à reconnaître les chats et un autre à reconnaître les chiens. Cela nécessiterait deux ensembles de données, un pour chaque animal, et doublerait le temps et la puissance de calcul nécessaires au développement de chaque modèle. Mais supposons que vous souhaitiez que l'ordinateur fasse la distinction entre les photos de chats et de chiens. Il faudrait alors former un troisième réseau, soit en utilisant toutes les données initiales, soit en comparant les deux modèles existants. Si l'on ajoute d'autres animaux, il faudra encore développer d'autres modèles.
La formation et le stockage d'un plus grand nombre de modèles nécessitent des ressources plus importantes, ce qui peut rapidement devenir un problème. La formation d'un réseau neuronal peut nécessiter des quantités de données et des semaines de temps. Par exemple, un système d'IA appelé GPT-3, qui a appris à produire un texte qui sonne comme s'il avait été écrit par un humain, a nécessité près de 15 jours de formation sur 10 000 processeurs d'ordinateurs haut de gamme1. L'ensemble de données ImageNet, souvent utilisé pour entraîner les réseaux neuronaux à la reconnaissance d'objets, contient plus de 14 millions d'images. Selon le sous-ensemble du nombre total d'images utilisé, le téléchargement peut prendre de quelques minutes à plus d'un jour et demi. Toute machine qui doit passer des jours à réapprendre une tâche chaque fois qu'elle rencontre de nouvelles informations s'immobilise.

Un système qui pourrait rendre la génération de modèles multiples plus efficace est Self-Net2créé par Rolando Estrada, informaticien à la Georgia State University d'Atlanta, et ses étudiants Jaya Mandivarapu et Blake Camp. Self-Net compresse les modèles afin d'éviter qu'un système contenant un grand nombre de modèles animaux différents ne devienne trop lourd.
Le système utilise un autoencodeur, un réseau neuronal distinct qui apprend quels paramètres - tels que les groupes de pixels dans le cas des tâches de reconnaissance d'images - le réseau neuronal original a pris en compte lors de la construction de son modèle. Une couche de neurones au milieu de l'autoencodeur oblige la machine à sélectionner un minuscule sous-ensemble des poids les plus importants du modèle. Il peut y avoir 10 000 valeurs numériques qui entrent dans le modèle et 10 000 autres qui en sortent, mais dans la couche centrale, l'autoencodeur réduit ces valeurs à 10 nombres seulement. Le système doit donc trouver les dix poids qui lui permettront d'obtenir le résultat le plus précis, explique M. Estrada.
Inscrivez-vous à la lettre d'information de Nature sur la robotique et l'IA
Le processus est similaire à la compression d'un grand fichier d'image TIFF en un fichier JPEG plus petit, explique-t-il ; il y a une légère perte de fidélité, mais ce qui reste est suffisamment bon. Le système élimine la plupart des données d'entrée originales, puis enregistre les dix meilleurs poids. Il peut ensuite les utiliser pour effectuer la même tâche d'identification des chats avec presque la même précision, sans avoir à stocker d'énormes quantités de données.
Pour rationaliser la création de modèles, les informaticiens ont souvent recours à la préformation. Les modèles formés pour effectuer des tâches similaires doivent apprendre des paramètres similaires, au moins dans les premières étapes. Un réseau neuronal qui apprend à reconnaître des objets dans des images, par exemple, doit d'abord apprendre à identifier les lignes diagonales et verticales. Il n'est pas nécessaire de repartir de zéro à chaque fois, de sorte que les nouveaux modèles peuvent être pré-entraînés avec les poids qui reconnaissent déjà ces caractéristiques de base. Pour créer des modèles capables de reconnaître des vaches, des cochons ou des kangourous, M. Estrada peut pré-entraîner d'autres réseaux neuronaux avec les paramètres de son autoencodeur. Étant donné que tous les animaux partagent certaines caractéristiques faciales, même si les détails de la taille ou de la forme sont différents, ce pré-entraînement permet de générer de nouveaux modèles plus efficacement.
Le système n'est pas un moyen parfait pour que les réseaux apprennent sur le tas, précise M. Estrada. Un humain doit encore indiquer à la machine quand changer de tâche, par exemple quand commencer à chercher des chevaux plutôt que des vaches. Pour ce faire, l'homme doit rester dans la boucle, et il n'est pas toujours évident pour lui de savoir qu'il est temps pour la machine de faire quelque chose de différent. Mais M. Estrada espère trouver un moyen d'automatiser le changement de tâche afin que l'ordinateur puisse apprendre à identifier les caractéristiques des données d'entrée et s'en servir pour décider du modèle à utiliser, de sorte qu'il puisse continuer à fonctionner sans interruption.

Fini l'ancien
Il peut sembler que la solution la plus évidente ne consiste pas à créer plusieurs modèles, mais plutôt à développer un réseau. Au lieu de développer deux réseaux pour reconnaître respectivement les chats et les chevaux, par exemple, il peut sembler plus facile d'apprendre au réseau qui reconnaît les chats à reconnaître également les chevaux. Cette approche oblige toutefois les concepteurs d'IA à se confronter à l'un des principaux problèmes de l'apprentissage tout au long de la vie, un phénomène connu sous le nom d'oubli catastrophique. Un réseau formé à la reconnaissance des chats développera un ensemble de poids sur ses neurones artificiels qui sont spécifiques à cette tâche. Si on lui demande ensuite d'identifier des chevaux, il commencera à réajuster les poids afin d'être plus précis pour les chevaux. Le modèle ne contiendra plus les bonnes pondérations pour les chats, ce qui l'amènera à oublier à quoi ressemble un chat. "La mémoire se trouve dans les poids. Lorsque vous l'entraînez avec de nouvelles informations, vous écrivez sur les mêmes poids", explique M. Siegelmann. "Vous pouvez avoir un milliard d'exemples de conduite d'une voiture, et maintenant vous lui enseignez 200 exemples liés à un accident que vous ne voulez pas voir se produire, et il se peut qu'il connaisse ces 200 cas et qu'il oublie le milliard.
L'une des méthodes permettant de surmonter l'oubli catastrophique consiste à rejouer, c'est-à-dire à prendre des données d'une tâche précédemment apprise et à les entrelacer avec de nouvelles données de formation. Toutefois, cette approche se heurte de plein fouet au problème des ressources. "Les mécanismes de relecture sont très gourmands en mémoire et en calcul, et nous ne disposons donc pas de modèles capables de résoudre ces problèmes de manière efficace en termes de ressources", explique M. Kudithipudi. Il peut également y avoir des raisons de ne pas stocker les données, par exemple pour des raisons de confidentialité ou de sécurité, ou parce qu'elles appartiennent à quelqu'un qui n'est pas disposé à les partager indéfiniment.
Selon M. Siegelmann, la relecture est à peu près analogue à ce que fait le cerveau humain lorsqu'il rêve. De nombreux neuroscientifiques pensent que le cerveau consolide les souvenirs et apprend des choses en rejouant ses expériences pendant le sommeil. De même, la relecture dans les réseaux neuronaux peut renforcer des poids qui pourraient autrement être écrasés. Mais le cerveau ne revoit pas ses expériences instant par instant, explique M. Siegelmann. Il réduit plutôt ces expériences à une poignée de caractéristiques et de modèles - un processus connu sous le nom d'abstraction - et ne rejoue que ces parties. La relecture inspirée par le cerveau de Mme Siegelmann tente de faire quelque chose de similaire ; au lieu de passer en revue des montagnes de données stockées, elle sélectionne certaines facettes de ce qu'elle a appris pour les rejouer. Selon Mme Siegelmann, chaque couche d'un réseau neuronal fait passer l'apprentissage à un niveau d'abstraction supérieur, depuis les données d'entrée spécifiques de la couche inférieure jusqu'aux relations mathématiques des données des couches supérieures. De cette manière, le système classe des exemples spécifiques d'objets dans des catégories. Elle laisse le réseau sélectionner les abstractions les plus importantes dans les deux couches supérieures et les rejouer. Cette technique permet de maintenir les poids appris raisonnablement stables - mais pas parfaitement - sans avoir à stocker les données précédemment utilisées.
Comme cette relecture inspirée du cerveau se concentre sur les points les plus saillants que le réseau a appris, ce dernier peut trouver plus facilement des associations entre les nouvelles et les anciennes données. La méthode aide également le réseau à distinguer des éléments de données qu'il n'aurait pas pu séparer facilement auparavant, par exemple en trouvant les différences entre une paire de jumeaux identiques. S'il n'y a plus qu'une poignée de paramètres dans chaque ensemble, au lieu de millions, il est plus facile de repérer les similitudes. "Maintenant, lorsque nous rejouons l'un avec l'autre, nous commençons à regarder les différences", explique M. Siegelmann. "Cela nous oblige à trouver la séparation, le contraste, les associations.
Se concentrer sur des abstractions de haut niveau plutôt que sur des éléments spécifiques est utile pour l'apprentissage continu, car cela permet à l'ordinateur de faire des comparaisons et des analogies entre différents scénarios. Par exemple, si votre voiture autonome doit déterminer comment conduire sur du verglas dans le Massachusetts, explique M. Siegelmann, elle pourrait utiliser les données dont elle dispose sur la conduite sur du verglas dans le Michigan. Ces exemples ne correspondront pas exactement aux nouvelles conditions, car ils concernent des routes différentes. Mais la voiture possède également des connaissances sur la conduite sur neige dans le Massachusetts, où les routes lui sont familières. Par conséquent, si la voiture peut identifier uniquement les différences et les similitudes les plus importantes entre la neige et la glace, le Massachusetts et le Michigan, au lieu de s'enliser dans des détails mineurs, elle pourrait trouver une solution à la situation spécifique et nouvelle de la conduite sur glace dans le Massachusetts.
Une approche modulaire
L'étude de la façon dont le cerveau traite ces questions peut inspirer des idées, même si elles ne reproduisent pas ce qui se passe biologiquement. Pour répondre au besoin d'un réseau neuronal capable d'apprendre des tâches sans écraser les anciennes, les scientifiques s'inspirent de la neurogenèse, le processus par lequel les neurones se forment dans le cerveau. Une machine ne peut pas se développer comme un corps, mais les informaticiens peuvent reproduire de nouveaux neurones dans un logiciel en générant des connexions dans certaines parties du système. Bien que les neurones matures aient appris à réagir à certaines données seulement, ces "bébés neurones" peuvent réagir à toutes les données. "Ils peuvent réagir aux nouveaux échantillons introduits dans le modèle", explique M. Kudithipudi. En d'autres termes, ils peuvent apprendre à partir de nouvelles informations tandis que les neurones déjà entraînés conservent ce qu'ils ont appris.
L'ajout de neurones n'est qu'un moyen parmi d'autres de permettre à un système d'apprendre de nouvelles choses. Estrada a proposé une autre approche, basée sur le fait qu'un réseau de neurones n'est qu'une approximation approximative d'un cerveau humain. Nous appelons les nœuds d'un réseau neuronal des "neurones". Mais si vous voyez ce qu'ils font réellement, ils calculent essentiellement une somme pondérée. C'est une vision incroyablement simplifiée des vrais neurones biologiques, qui effectuent toutes sortes de traitements de signaux non linéaires complexes".
Afin d'imiter avec plus de succès certains des comportements complexes des vrais neurones, Estrada et ses étudiants ont développé ce qu'il appelle des neurones artificiels profonds (DAN).3. Un DAN est un petit réseau neuronal qui est traité comme un seul neurone dans un réseau neuronal plus large.
Plus d'informations sur les perspectives de la nature
Les DAN peuvent être formés pour une tâche particulière - par exemple, Estrada pourrait en développer un pour identifier des chiffres manuscrits. Le modèle du DAN est alors fixé, de sorte qu'il ne peut être modifié et qu'il fournira toujours la même sortie aux autres neurones dans les couches du réseau toujours entraînables qui l'entourent. Ce réseau plus vaste peut continuer à apprendre une tâche connexe, telle que l'identification de chiffres écrits par quelqu'un d'autre, mais le modèle original n'est pas oublié. "On se retrouve avec un module polyvalent que l'on peut réutiliser pour des tâches similaires à l'avenir", explique M. Estrada. "Ces modules permettent au système d'apprendre à exécuter les nouvelles tâches de la même manière que les anciennes, de sorte que les fonctionnalités sont plus compatibles les unes avec les autres au fil du temps. Cela signifie que les fonctionnalités sont plus stables et qu'il y a moins d'oublis".
Jusqu'à présent, Estrada et ses collègues ont montré que cette technique fonctionne pour des tâches relativement simples, telles que la reconnaissance des nombres. Mais ils essaient de l'adapter à des problèmes plus complexes, notamment pour apprendre à jouer à de vieux jeux vidéo tels que Space Invaders. "Si nous y parvenons, nous pourrons l'utiliser pour des tâches plus sophistiquées", explique M. Estrada. Il pourrait, par exemple, s'avérer utile pour les drones autonomes, qui sont envoyés avec une programmation de base mais doivent s'adapter à de nouvelles données dans l'environnement, et devront effectuer tout apprentissage à la volée en respectant des contraintes strictes en matière de puissance et de traitement.
Il reste un long chemin à parcourir avant que l'IA puisse fonctionner comme l'homme, c'est-à-dire faire face à une variété infinie de scénarios en constante évolution. Mais si les informaticiens parviennent à mettre au point des techniques permettant aux machines de s'adapter en permanence, comme le font les êtres vivants, cela pourrait contribuer à rendre les systèmes d'IA plus polyvalents, plus précis et d'une intelligence plus reconnaissable.
doi: https://doi.org/10.1038/d41586-022-01962-y
Cet article fait partie de Nature Outlook : Robotique et intelligence artificielle, un supplément indépendant sur le plan éditorial, produit avec le soutien financier de tiers. À propos de ce contenu.
Références
- Patterson, D. et al. Preprint sur https://arxiv.org/abs/2104.10350 (2021).
- Mandivarapu, J. K., Camp, B. & Estrada, R. Front. Artif. Intell. 3, 19 (2020).PubMed Article Google Scholar
- Camp, B., Mandivarapu, J. K. & Estrada, R. Preprint at https://arxiv.org/abs/2011.07035 (2020).
Cet article a été rédigé par Marcus Woo et publié à l'origine dans Nature
Fourchette à la main, un bras robotisé embroche une fraise depuis le haut et l'amène à la bouche de Tyler Schrenk. Assis dans son fauteuil roulant, Schrenk avance son cou pour prendre une bouchée. Le bras s'attaque ensuite à une tranche de banane, puis à une carotte. Chaque mouvement s'effectue de lui-même, sur commande vocale de Schrenk.
Pour M. Schrenk, qui est devenu paralysé à partir du cou après un accident de plongée en 2012, un tel dispositif ferait une énorme différence dans sa vie quotidienne s'il était installé à son domicile. "S'habituer à ce que quelqu'un d'autre me nourrisse a été l'une des choses les plus étranges auxquelles j'ai dû faire face", explique-t-il. "Cela contribuerait sans aucun doute à mon bien-être et à ma santé mentale.
Son domicile est déjà équipé d'interrupteurs et d'ouvre-portes à commande vocale, ce qui lui permet d'être indépendant pendant environ 10 heures par jour sans l'aide d'un soignant. "J'ai été capable de comprendre la plupart des choses", dit-il. "Mais je ne peux pas me nourrir seul. C'est pourquoi il a voulu tester le robot d'alimentation, baptisé ADA (abréviation de "assistive dexterous arm"). Des caméras placées au-dessus de la fourche permettent à ADA de voir ce qu'il doit prendre. Mais pour savoir avec quelle force planter une fourchette dans une banane molle ou une carotte croquante, et avec quelle force saisir l'ustensile, il faut un sens que les humains considèrent comme allant de soi : "Le toucher est essentiel", explique Tapomayukh Bhattacharjee, roboticien à l'université Cornell d'Ithaca, dans l'État de New York, qui a dirigé la conception d'ADA alors qu'il travaillait à l'université de Washington, à Seattle. Les deux doigts du robot sont équipés de capteurs qui mesurent la force latérale (ou de cisaillement) lorsque l'on tient la fourchette.1. Ce système n'est qu'un exemple des efforts croissants déployés pour doter les robots d'un sens du toucher.
Partie de Nature Outlook : Robotique et intelligence artificielle
"Les choses vraiment importantes impliquent la manipulation, impliquent que le robot tende la main et modifie quelque chose dans le monde", explique Ted Adelson, spécialiste de la vision par ordinateur au Massachusetts Institute of Technology (MIT) à Cambridge. Ce n'est qu'avec un retour d'information tactile qu'un robot peut ajuster sa prise pour manipuler des objets de tailles, de formes et de textures différentes. Grâce au toucher, les robots peuvent aider les personnes à mobilité réduite, ramasser des objets mous tels que des fruits, manipuler des matériaux dangereux et même aider à la chirurgie. La détection tactile pourrait également permettre d'améliorer les prothèses, d'aider les gens à rester littéralement en contact à distance, et même de réaliser le fantasme du robot ménager polyvalent qui s'occuperait de la lessive et de la vaisselle. "Si nous voulons des robots chez nous pour nous aider, nous voulons qu'ils soient capables d'utiliser leurs mains", explique M. Adelson. "Et si vous utilisez vos mains, vous avez vraiment besoin d'un sens du toucher.
Avec cet objectif en tête, et portés par les progrès de l'apprentissage automatique, les chercheurs du monde entier développent une myriade de capteurs tactiles, depuis les dispositifs en forme de doigt jusqu'aux peaux électroniques. L'idée n'est pas nouvelle, explique Veronica Santos, roboticienne à l'université de Californie à Los Angeles. Mais les progrès réalisés en matière de matériel, de puissance de calcul et de savoir-faire algorithmique ont dynamisé le secteur. "La détection tactile et la manière de l'intégrer aux robots suscitent un nouvel enthousiasme", explique Veronica Santos.
Sentir par la vue
L'un des capteurs les plus prometteurs repose sur une technologie bien établie : les caméras. Les caméras d'aujourd'hui sont peu coûteuses mais puissantes, et combinées à des algorithmes sophistiqués de vision par ordinateur, elles ont donné naissance à toute une série de capteurs tactiles. Les différents modèles utilisent des techniques légèrement différentes, mais ils interprètent tous le toucher en capturant visuellement la façon dont un matériau se déforme au contact.
L'ADA utilise un capteur à base de caméra appelé GelSight, dont le premier prototype a été conçu par M. Adelson et son équipe il y a plus de dix ans.2. Une lumière et une caméra sont placées derrière un morceau de matériau souple et caoutchouteux, qui se déforme lorsqu'un objet exerce une pression sur lui. La caméra capture alors la déformation avec une sensibilité surhumaine, discernant des bosses aussi petites qu'un micromètre. GelSight peut également évaluer les forces, y compris les forces de cisaillement, en suivant le mouvement d'un motif de points imprimés sur le matériau caoutchouteux lorsqu'il se déforme.2.
GelSight n'est pas le premier ni le seul capteur basé sur une caméra (ADA a été testé avec un autre capteur, appelé FingerVision). Toutefois, sa conception relativement simple et facile à fabriquer l'a distingué jusqu'à présent, explique Roberto Calandra, chercheur à Meta AI (anciennement Facebook AI) à Menlo Park, en Californie, qui a collaboré avec M. Adelson. En 2011, M. Adelson a cofondé une entreprise, également appelée GelSight, basée sur la technologie qu'il a développée. L'entreprise, basée à Waltham, dans le Massachusetts, a concentré ses efforts sur des industries telles que l'aérospatiale, en utilisant la technologie des capteurs pour inspecter les fissures et les défauts sur les surfaces.
L'un des derniers capteurs à base de caméra s'appelle Insight, documenté cette année par Huanbo Sun, Katherine Kuchenbecker et Georg Martius à l'Institut Max Planck pour les systèmes intelligents à Stuttgart, en Allemagne.3. L'appareil, qui ressemble à un doigt, est constitué d'un dôme souple, opaque, en forme de tente, maintenu par de fines entretoises, qui dissimule une caméra à l'intérieur.
Il n'est pas aussi sensible que GelSight, mais il offre d'autres avantages. GelSight se limite à détecter le contact sur une petite surface plane, alors qu'Insight détecte le contact tout autour du doigt en 3D, explique M. Kuchenbecker. La surface en silicone d'Insight est également plus facile à fabriquer et détermine les forces avec plus de précision. Selon M. Kuchenbecker, la surface intérieure bosselée d'Insight rend les forces plus facilement visibles et, contrairement à la méthode de GelSight qui consiste à déterminer d'abord la géométrie de la surface de caoutchouc déformée puis à calculer les forces en jeu, Insight détermine les forces directement à partir de la façon dont la lumière frappe sa caméra. M. Kuchenbecker pense que cela fait d'Insight une meilleure option pour un robot qui doit saisir et manipuler des objets ; Insight a été conçu pour former les extrémités d'une pince robotique à trois chiffres appelée TriFinger.
Solutions pour la peau
Les capteurs à base de caméra ne sont pas parfaits. Par exemple, ils ne peuvent pas détecter des forces invisibles, telles que l'ampleur de la tension d'une corde ou d'un fil tendu. La fréquence d'images d'une caméra peut également ne pas être assez rapide pour capturer des sensations fugaces, telles qu'une poignée qui glisse, explique M. Santos. Enfin, l'insertion d'un capteur relativement encombrant dans un doigt ou une main de robot, déjà encombré d'autres capteurs ou actionneurs (les composants qui permettent à la main de bouger), peut également poser problème.
C'est l'une des raisons pour lesquelles d'autres chercheurs conçoivent des dispositifs plats et flexibles qui peuvent s'enrouler autour d'un appendice de robot. Zhenan Bao, ingénieur chimiste à l'université Stanford en Californie, conçoit des peaux qui intègrent de l'électronique flexible et reproduisent la capacité du corps à percevoir le toucher. En 2018, par exemple, son groupe a créé une peau qui détecte la direction des forces de cisaillement en imitant la structure bosselée d'une couche de la peau humaine située sous la surface, appelée spinosum4.

Lorsqu'un toucher doux appuie la couche externe de la peau humaine sur les bosses en forme de dôme du spinosum, les récepteurs situés dans les bosses ressentent la pression. Un toucher plus ferme active des récepteurs plus profonds situés sous les bosses, ce qui permet de distinguer un toucher dur d'un toucher doux. Une force latérale est ressentie comme une pression exercée sur le côté des bosses.
La peau électronique de Bao présente également une structure bosselée qui détecte l'intensité et la direction des forces. Chaque bosse d'un millimètre est recouverte de 25 condensateurs qui stockent l'énergie électrique et agissent comme des capteurs individuels. Lorsque les couches sont pressées l'une contre l'autre, la quantité d'énergie stockée change. Selon M. Bao, les capteurs sont si petits qu'un patch de peau électronique peut en contenir un grand nombre, ce qui permet à la peau de détecter les forces avec précision et d'aider un robot à effectuer des manipulations complexes d'un objet.
Pour tester la peau, les chercheurs ont fixé un patch au bout du doigt d'un gant en caoutchouc porté par une main robotisée. La main a pu tapoter le sommet d'une framboise et ramasser une balle de ping-pong sans l'écraser.
Bien que d'autres peaux électroniques ne soient pas aussi denses en capteurs, elles sont généralement plus faciles à fabriquer. En 2020, Benjamin Tee, un ancien étudiant de Bao qui dirige aujourd'hui son propre laboratoire à l'université nationale de Singapour, a mis au point un polymère semblable à une éponge capable de détecter les forces de cisaillement5. De plus, à l'instar de la peau humaine, ce polymère est autocicatrisant : après avoir été déchiré ou coupé, il se ressoude sous l'effet de la chaleur et reste extensible, ce qui est utile pour faire face à l'usure et aux déchirures.
Ce matériau, appelé AiFoam, est doté d'électrodes souples en fil de cuivre qui reproduisent approximativement la répartition des nerfs sur la peau humaine. Lorsqu'on la touche, la mousse se déforme et les électrodes se serrent l'une contre l'autre, ce qui modifie le courant électrique qui la traverse. Cela permet de mesurer à la fois l'intensité et la direction des forces. AiFoam peut même détecter la présence d'une personne juste avant qu'elle n'entre en contact : lorsque son doigt s'approche à quelques centimètres, il abaisse le champ électrique entre les électrodes de la mousse.
En novembre dernier, des chercheurs de Meta AI et de l'université Carnegie Mellon de Pittsburgh, en Pennsylvanie, ont annoncé la création d'une peau sensible au toucher composée d'un matériau caoutchouteux incrusté de particules magnétiques.6. Baptisée ReSkin, cette peau se déforme en même temps que les particules, ce qui modifie le champ magnétique. Elle est conçue pour être facilement remplacée - elle peut être décollée et une nouvelle peau installée sans nécessiter de recalibrage complexe - et 100 capteurs peuvent être produits pour moins de 6 USD.
Plutôt que d'être des outils universels, les différentes peaux et les différents capteurs se prêteront probablement à des usages particuliers. Bhattacharjee et ses collègues, par exemple, ont créé un manchon extensible qui s'adapte à un bras robotique et qui est utile pour détecter les contacts accidentels entre un bras robotique et son environnement7. La feuille est fabriquée à partir d'un tissu stratifié qui détecte les changements de résistance électrique lorsqu'une pression lui est appliquée. Elle ne peut pas détecter les forces de cisaillement, mais elle peut couvrir une large zone et s'enrouler autour des articulations d'un robot.
M. Bhattacharjee utilise le manchon pour identifier non seulement le moment où un bras robotique entre en contact avec quelque chose lorsqu'il se déplace dans un environnement encombré, mais aussi ce contre quoi il se cogne. Si un robot d'assistance dans une maison heurte un rideau alors qu'il cherche un objet, il peut continuer à avancer, mais s'il entre en contact avec un verre à vin fragile, il devra prendre des mesures d'évitement.
D'autres approches utilisent l'air pour donner le sens du toucher. Certains robots utilisent des pinces à succion pour saisir et déplacer des objets dans les entrepôts ou dans les océans. Dans ces cas, Hannah Stuart, ingénieur mécanicien à l'université de Californie à Berkeley, espère que la mesure du flux d'air de succion pourra fournir un retour d'information tactile à un robot. Son groupe a montré que le débit d'air peut déterminer la force de la prise de la pince aspirante et même la rugosité de la surface sur laquelle elle est aspirée.8. Et sous l'eau, il peut révéler comment un objet se déplace lorsqu'il est tenu par une main robotisée à succion9.
Traitement des sentiments
Les technologies tactiles d'aujourd'hui sont diverses, explique Mme Kuchenbecker. "Il existe de nombreuses options réalisables, et les gens peuvent s'appuyer sur le travail des autres", dit-elle. Mais concevoir et fabriquer des capteurs n'est qu'un début. Les chercheurs doivent ensuite les intégrer dans un robot, qui doit alors déterminer comment utiliser les informations d'un capteur pour exécuter une tâche. "C'est en fait la partie la plus difficile", explique M. Adelson.
Pour les peaux électroniques qui contiennent une multitude de capteurs, le traitement et l'analyse des données provenant de chacun d'entre eux nécessiteraient beaucoup de temps de calcul et d'énergie. Pour traiter autant de données, des chercheurs comme M. Bao s'inspirent du système nerveux humain, qui traite aisément un flot constant de signaux. Depuis plus de 30 ans, les informaticiens tentent d'imiter le système nerveux à l'aide d'ordinateurs neuromorphiques. Mais l'objectif de M. Bao est de combiner une approche neuromorphique avec une peau souple qui pourrait s'intégrer au corps de manière transparente, par exemple sur un bras bionique.
Inscrivez-vous à la lettre d'information de Nature sur la robotique et l'IA
Contrairement à d'autres capteurs tactiles, les peaux de Bao transmettent les signaux sensoriels sous forme d'impulsions électriques, comme celles des nerfs biologiques. L'information n'est pas stockée dans l'intensité des impulsions, qui peut diminuer au fur et à mesure que le signal se déplace, mais dans leur fréquence. Par conséquent, le signal ne perd pas beaucoup d'informations à mesure que la portée augmente, explique-t-elle.
Les impulsions provenant de plusieurs capteurs se rencontreraient au niveau de dispositifs appelés transistors synaptiques, qui combineraient les signaux en un modèle d'impulsions, à l'instar de ce qui se passe lorsque les nerfs se rencontrent au niveau des jonctions synaptiques. Ensuite, au lieu de traiter les signaux de chaque capteur, un algorithme d'apprentissage automatique n'a plus qu'à analyser les signaux de plusieurs jonctions synaptiques, en apprenant si ces motifs correspondent, par exemple, au duvet d'un pull ou à l'adhérence d'un ballon.
En 2018, le laboratoire de Bao a intégré cette capacité dans un système nerveux artificiel simple et flexible, capable d'identifier les caractères Braille.10. Fixé à la patte d'un cafard, le dispositif pouvait stimuler les nerfs de l'insecte, démontrant ainsi le potentiel d'un dispositif prothétique pouvant s'intégrer au système nerveux d'une créature vivante.
En fin de compte, pour donner un sens aux données des capteurs, un robot doit s'appuyer sur l'apprentissage automatique. Traditionnellement, le traitement des données brutes d'un capteur était fastidieux et difficile, explique M. Calandra. Pour comprendre les données brutes et les convertir en nombres physiquement significatifs tels que la force, les roboticiens devaient calibrer et caractériser le capteur. Grâce à l'apprentissage automatique, les roboticiens peuvent sauter ces étapes laborieuses. Les algorithmes permettent à un ordinateur de passer au crible une énorme quantité de données brutes et d'identifier lui-même des modèles significatifs. Ces modèles - qui peuvent représenter une prise suffisamment serrée ou une texture rugueuse - peuvent être appris à partir de données d'entraînement ou de simulations informatiques de la tâche prévue, puis appliqués à des scénarios réels.
"Nous venons tout juste de commencer à explorer l'intelligence artificielle pour la détection du toucher", explique M. Calandra. "Nous sommes loin de la maturité d'autres domaines tels que la vision par ordinateur ou le traitement du langage naturel. Les données de vision par ordinateur sont basées sur un réseau bidimensionnel de pixels, une approche que les informaticiens ont exploitée pour développer de meilleurs algorithmes. Mais les chercheurs ne savent toujours pas quelle pourrait être une structure comparable pour les données tactiles. Comprendre la structure de ces données et apprendre à en tirer parti pour créer de meilleurs algorithmes sera l'un des plus grands défis de la prochaine décennie.
Suppression des barrières
L'essor de l'apprentissage automatique et la diversité du matériel émergent sont de bon augure pour l'avenir de la détection tactile. Mais la pléthore de technologies représente également un défi, selon les chercheurs. Étant donné que de nombreux laboratoires disposent de leurs propres prototypes de matériel, de logiciels et même de formats de données, les scientifiques ont du mal à comparer les dispositifs et à s'appuyer sur les travaux des uns et des autres. Et si les roboticiens veulent intégrer pour la première fois la détection tactile dans leur travail, ils devront construire leurs propres capteurs à partir de zéro - une tâche souvent coûteuse et qui ne relève pas nécessairement de leur domaine d'expertise.
Plus d'informations sur les perspectives de la nature
C'est pourquoi, en novembre dernier, GelSight et Meta AI ont annoncé un partenariat pour la fabrication d'un capteur de type caméra au bout du doigt appelé DIGIT. Avec un prix de vente de 300 dollars, le dispositif est conçu pour être un capteur standard, relativement bon marché et prêt à l'emploi, qui peut être utilisé dans n'importe quel robot. "Cela aide sans aucun doute la communauté de la robotique, qui a été freinée par le coût élevé du matériel", explique M. Santos.
En fonction de la tâche, cependant, vous n'avez pas toujours besoin d'un matériel aussi avancé. Dans un article publié en 2019, un groupe du MIT dirigé par Subramanian Sundaram a construit des capteurs en prenant en sandwich quelques couches de matériaux, qui changent de résistance électrique lorsqu'ils sont soumis à une pression.11. Ces capteurs ont ensuite été incorporés dans des gants, pour un coût matériel total de seulement 10 dollars. Avec l'aide de l'apprentissage automatique, même un outil aussi simple que celui-ci peut aider les roboticiens à mieux comprendre les nuances de la préhension, explique Sundaram.
Tous les roboticiens ne sont pas non plus des spécialistes de l'apprentissage automatique. Pour y remédier, Meta AI a mis à la disposition des chercheurs un logiciel open source. "J'espère qu'en ouvrant cet écosystème, nous abaissons la barre d'entrée pour les nouveaux chercheurs qui veulent s'attaquer au problème", explique M. Calandra. "C'est vraiment le début.
Bien que la préhension et la dextérité continuent d'être au cœur de la robotique, la détection tactile ne sert pas qu'à cela. Un robot souple et glissant pourrait avoir besoin de sentir son chemin pour naviguer dans les décombres dans le cadre d'opérations de recherche et de sauvetage, par exemple. Un robot pourrait également avoir besoin de sentir une tape dans le dos : Mme Kuchenbecker et son étudiante Alexis Block ont construit un robot doté de capteurs de couple dans les bras, d'un capteur de pression et d'un microphone à l'intérieur d'un corps souple et gonflable capable de donner une étreinte confortable et agréable, puis de la relâcher lorsque vous la lâchez. Ce type de toucher humain est essentiel pour de nombreux robots qui interagissent avec les personnes, notamment les prothèses, les aides ménagères et les avatars à distance. C'est dans ces domaines que la détection tactile pourrait s'avérer la plus importante, selon M. Santos. "C'est vraiment l'interaction entre l'homme et le robot qui sera le moteur de cette technologie.
Jusqu'à présent, le toucher robotisé est principalement confiné aux laboratoires de recherche. "Le besoin existe, mais le marché n'est pas encore tout à fait là", explique M. Santos. Mais certains de ceux qui ont eu un avant-goût de ce qu'il est possible de faire sont déjà impressionnés. Les essais d'ADA, le robot nourricier de Schrenk, ont donné un aperçu alléchant de l'indépendance. "C'était vraiment cool", dit-il. "C'était un regard sur l'avenir, sur ce qui pourrait être possible pour moi.
doi: https://doi.org/10.1038/d41586-022-01401-y
Cet article fait partie de Nature Outlook : Robotique et intelligence artificielle, un supplément indépendant sur le plan éditorial, produit avec le soutien financier de tiers. À propos de ce contenu.
Références
- Song, H., Bhattacharjee, T. & Srinivasa, S. S. 2019 International Conference on Robotics and Automation 8367-8373 (IEEE, 2019).Google Scholar
- Yuan, W., Dong, S. & Adelson, E. H. Sensors 17, 2762 (2017).Article Google Scholar
- Sun, H., Kuchenbecker, K. J. & Martius, G. Nature Mach. Intell. 4, 135-145 (2022).Article Google Scholar
- Boutry, C. M. et al. Sci. Robot. 3, aau6914 (2018).Article Google Scholar
- Guo, H. et al. Nature Commun. 11, 5747 (2020).PubMed Article Google Scholar
- Bhirangi, R., Hellebrekers, T., Majidi, C. & Gupta, A. Preprint sur http://arxiv.org/abs/2111.00071 (2021).
- Wade, J., Bhattacharjee, T., Williams, R. D. & Kemp, C. C. Robot. Auton. Syst. 96, 1-14 (2017).Article Google Scholar
- Huh, T. M. et al. 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems 1786-1793 (IEEE, 2021).Google Scholar
- Nadeau, P., Abbott, M., Melville, D. & Stuart, H. S. 2020 IEEE International Conference on Robotics and Automation 3701-3707 (IEEE, 2020).Google Scholar
- Kim, Y. et al. Science 360, 998-1003 (2018).PubMed Article Google Scholar
- Sundaram, S. et al. Nature 569, 698-702 (2019).PubMed Article Google Scholar
